産業用途
ファクトリオートメーション(FA)、ロボット加工などに
LED式UV照射器
カンタム・ウシカタ(Kantum Ushikata)社 UV-LED露光用光源 UVE-365-4040

- 産業用途
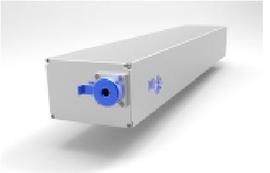
弊社、独自の総合技術(光学、放熱、機械、電気設計)により、 UV-LED光源として画期的な完全な平行光を作ることに 成功しました。
特許 第6832588号
-
- 波長
- 365 nm,405 nm
カンタム・ウシカタ(Kantum Ushikata)社 UV-LED露光用光源 UVE-365-100100

- 産業用途
業界最小サイズ、弊社、独自の総合技術(光学、放熱、機械、電気設計)により、UV-LED光源として画期的な完全な平行光を作ることに成功 しました。
特許 第6832588号
-
- 波長
- 365 nm,405 nm
UV接着剤硬化用 UV-1H

- 加工用途
- 産業用途
UV-1HはUV接着剤硬化用として、お客様の使い易さと低価格を徹底的に追求したLED式UV照射器です。
-
- 波長
- 365nm,385nm,450nm
カンタム・ウシカタ(Kantum Ushikata)社 UV-LED露光用光源 ラインタイプ UVE-365-40200

- 産業用途
UV-LEDが有する様々なメリット(水銀フリ ー 、小型、長寿命、電気代の削減、付帯設備が不要等)に付加した独自の技術により、非常に小型でコストパフォー マンスに優れた露光用光源をリリー ス。
ライン型UV-LED露光用光源はランプでは困難な高品質の大面積の露光や精密部品の接着剤硬化を実現します。
また、必要とするタクトタイムやエネルギー により使用する台数を容易に増やすことができるため無駄の少ない設備投資ができます。
特許 第6832588号
-
- 波長
- 365 nm,385nm,405 nm
-
- 出力
- 照度 : 2omW /cm2
UV-LED式UV照射器 UV-4Hシリーズ

- 加工用途
- 産業用途
ライン照射タイプ・面照射タイプのLED式UV照射器です。用途は紫外線硬化や非破壊検査、検品等
-
- 波長
- 365 nm
-
- 出力
- 照度:〜3000 mW/㎠
カンタム・ウシカタ社製 UV-LED小型水除菌モジュール

- 医療用途
- 理化学用途
- 産業用途
深紫外LEDを⽤いた⼩型⽔除菌装置。
独⾃の光学設計を⽤い、除菌効果をアップ。
ピコ秒レーザー
MPB Communications社 ピコ秒シードファイバーレーザー

- 加工用途
- 医療用途
- 微細用途
- 理化学用途
- 産業用途
長年にわたる通信分野による経験を活かした極めて信頼性の高いピコ秒ファイバーレーザーです。信頼性のあるSESAMを用いておりますが、SESAMを使用しない"All-Fiber-Mode-Lock"のピコ秒ファイバーレーザーもございます。シード光源に最適で、世界的に多くの実績がございます。
-
- 波長
- 1020-1100nm
-
- 出力
- Seed光のみ:2-10mW, 前置増幅:150mW, 主増幅:3W
Huaray社 産業用ピコ秒UVレーザー

- 微細用途
- 産業用途
ハーレイ プレシジョン社のオリーブ(Olieve)シリーズはDPSSレーザーとファイバレーザーの利点から設計されたパルス幅< 10psのピコ秒UVレーザーです。
アプリケーション対応素材
・ウエハ ・偏光フィルム ・PETフィルム ・太陽光発電 ・LCD/OLED
・半導体 ・セラミック ・サファイア ・ガラス
-
- 波長
- 355 nm
-
- 出力
- 10 W
Huaray社 産業用ピコ秒グリーンレーザー

- 微細用途
- 産業用途
ハーレイ プレシジョン社のオリーブ(Olieve)シリーズはDPSSレーザーとファイバレーザーの利点から設計された波長532nm,パルス幅< 10psのピコ秒レーザーです。
アプリケーション素材
・ウェーハ ・医療用フィルム ・偏光フィルム ・PETフィルム ・PLフィルム ・太陽光発電
・バッテリータブ ・LCD/OLED ・半導体 ・セラミック ・サファイア ・ガラス
-
- 波長
- 532 nm
-
- 出力
- 4W,15W,30 W
Huaray社 産業用ピコ秒IRレーザー

- 微細用途
- 産業用途
ハーレイ プレシジョン社のオリーブ(Olieve)シリーズはDPSSレーザーとファイバレーザーの利点から設計されたパルス幅< 10ps, Olive-IRシリーズは平均出力20W〜100Wのピコ秒レーザーです。
アプリケーション対応素材
・ウェーハ ・医療用フィルム ・偏光フィルム ・PETフィルム ・PLフィルム ・太陽光発電
・バッテリータブ ・LCD/OLED ・半導体 ・セラミック ・サファイアガラス
-
- 波長
- 1064 nm
-
- 出力
- 30 W
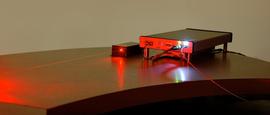
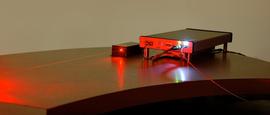
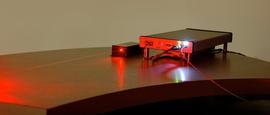
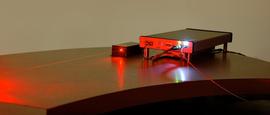
ファイバークリスト社(Fibercryst)サブナノ秒レーザー (2 mJ, 650 ps)

- 加工用途
- 理化学用途
- 産業用途
- 計測用途
高いダメージ閾値を持つ単結晶ファイバーをレーザー媒質に用いることで、CPA(チャープパルス増幅)をすることなく高出力の超短パルスを得られるレーザー発振器です。仕様をカスタマイズできますので、高出力化等のご要望がありましたらお申し付け下さい。
-
- 波長
- 1064 nm
-
- 出力
- 2 W (2 mJ@1 kHz)
リニアステージ
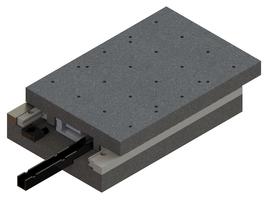
グラナイトリニアステージ
- 加工用途
- 微細用途
- 産業用途
- 計測用途
グラナイトベースにリニアモーターを用いた超高精度ステージにより、超短パルスレーザーを用いた微細加工に有力です。コントローラはイスラエルのACS社とのジョイントベンチャーであるBusch ACS 社を設立し、より精密加工の仕様に応えることができます。
詳しくはBusch Microsystemsの特設サイトを御覧下さい。
ユニバーサルロボット用グリッパ
ロボテック社ROBOTIQ ユニバーサルロボット用フレキシブルグリッパー 2finger

- 産業用途
ロボテック社ROBOTIQ フレキシブルグリッパーはユニバーサルロボットとの組み合わせにより、短時間で様々な用途に使用可能。あなたのロボットを最大限に活用できます。
ロボテック社ROBOTIQ ユニバーサルロボット用アディティブグリッパー 3finger

- 産業用途
ロボテック社ROBOTIQ アディティブグリッパーはユニバーサルロボットとの組み合わせにより、頑丈で機敏なグリッパーで ロボットに手の機能を 提供します。
ロボテック社ROBOTIQ ユニバーサルロボット用バキューム·グリッパー

- 産業用途
Robotiqのバキュームグリッパーは、 幅広い用途に対応し、ボール紙、ガラス、シートメタル(乾燥)、プラスチックなどさまざまな材質の起伏のある部品や平らな部品のピッキングに最適です。Robotiqバキュームグリッパーは、カスタマイズ可能なブラケットと独自のエアノードにより、製造上の用途に合わせて自在に制御できます。
OnRobot社 ユニバーサルロボット用ロボットグリッパー RG2

- 産業用途
グリッパーRG2は最大荷重2kg、最大ストローク110 mmのクイックチェンジャーを内蔵した柔軟な協調型グリッパーです。
インテリジェンス、迅速な設置、カスタマイズやプログラミングが簡単です。
OnRobot社 ユニバーサルロボット用3指グリッパー

- 産業用途
3FG15はCNC旋盤といったマシン・テンディング用途でさまざまな円筒形の物体をつかむのに最適です。グリッパーはワークピースが自動的に中央に配置されるよう設計されているため、強力で安定したグリップと正確な配置により素早く導入できます。3FG15は最大15kgの物体を持ち上げることができ、大きくてかさばる柔軟性の低いフィンガーグリッパーより優れています。
OnRobot社 ユニバーサルロボット用VG10バキュームグリッパー

- 産業用途
VG10バキュームグリッパーは、協調ロボットアプリケーション用に特別に設計されたアームの先端工具(EoAT)です。VG10の調整可能な真空およびグリップアームは、さまざまなサイズおよび形状のワークを含む作業に最適です。
OnRobot社 ユニバーサルロボット用VGC10コンパクトバキュームグリッパー

- 産業用途
VGC10電動コンパクトバキュームグリッパーには、カスタマイズの可能性が無限。ほぼすべての用途のニーズに合わせて、吸引カップのオプションも変更可能。
OnRobot社 ユニバーサルロボット用GECKOシングルパッドグリッパー
- 産業用途
Geckoシングルパッド(SP)グリッパーは、これまで自動化できなかった省スペース型アプリケーションに、革新的なGecko粘着グリッパー技術を適用します。ヤモリにヒントを得た粘着技術は、プリント基板のような多孔質の表面や光沢のある表面にも、高精度で跡を残さないグリップを実現しています。このため、クリーニング工程が不要です。Geckoシングルパッドグリッパーには名称に有効荷重(キロ)がついた3モデル(SP1、SP3、SP5)があり、業界を率いる小型ロボットや協働ロボットとともに活躍しています。コンパクトなシングルパッド設計は、狭いスペースでもワークピースへのアクセスを容易にします。
OnRobot社 ユニバーサルロボット用ソフトグリッパー
- 産業用途
OnRobotソフトグリッパーは幅広いイレギュラーな形とデリケートな製品を持ち上げることができ、飲食物生産だけでなく製造または梱包のピック・アンド・プレイスに最適です。このグリッパーは3つの交換可能なシリコン成形のカップを用いて使用することができます。 卵からフルーツ、ビン、または缶まで、飲食物のオートメーションが実に簡単になります。
ASPINA(シナノケンシ)社 電動3爪ロボットハンド ARH350A/ARH305B

- 加工用途
- 理化学用途
- 産業用途
電動3爪ロボットハンド ARH350A/ARH305Bは、コンパクトなサイズでも最大開口径が大きく、小さなワークから大きなワークまで一つのハンドで対応可能です。トルク、速度、位置の調整ができるためソフトワークの形状を崩すことなく掴めます。
ハンド中央部は中空構造となっているため、エアツールやカメラ、センサーなどの追加が容易に行えます。
Piab社UR用バキュームグリッパー/真空グリッパー

- 産業用途
独自の真空技術を取り入れ、効率性と生産性、作業環境を改善するpiCOBOT®は、URロボットのアームに直接取り付けが可能です。また、お客様のアプリケーションに合わせてPiab社の幅広いモデルのサクションカップ の中から選択するカスタマイズも可能です。
Piab社UR用バキュームグリッパー Kenos(ケノス)KCSグリッパー
- 産業用途
Kenos® KCS グリッパーは汎用性が高く、ワークをピックア ップする際に独自のレベルの柔軟性を提供します。軽量構造で、強力な真空を発生させるエジェクターCOAX®SXカートリッジを内蔵しており、コントロールバルブと真空センサーなどの制御機構がオプションとして利用でき、プラグ&プレイシステムを実現します。
CKD社ユニバーサルロボット用グリッパ

- 産業用途
CKDは3タイプの協働ロボット用グリッパ「RLSH-コンパクト」、「RHLF-ロングストローク」、「RCKL-3方爪」をユニバーサルロボットユーザーへ提供します。空気圧式のため小型、軽量ながら高把持力で、動作設定も簡単です。グリッパは工具なしで交換することができ、全シリーズ共通のフランジを使用しているため、段取り替えが簡単に行えます。さらに、作業者の安全のため、グリッパの作動状態を瞬時に確認できる、360度視認可能なインジケータランプを搭載しています。CKD 協働ロボット用グリッパは、プラグ&プレイに必要なすべての機器をオプションとして用意しています。
シュマルツ社SCHMALZユニバーサルロボット用バキュームグリッパー

- 産業用途
真空搬送のベスト・ソリューション
シュマルツは自動搬送用およびクランプ用真空機器のメーカーです。工場内で生産される様々な製品を吸着し自動搬送する真空機器や、加工前の材料を吸着し保持するクランプシステムによって、製造業の生産性向上・コスト削減に貢献します。
GIMATIC ユニバーサルロボット用バキュームグリッパー KIT-UR-V

- 産業用途
空ベースのピックアンドプレース操作用のEnd Of The Armツール(EOAT)。このシステムは、UR 3、UR 5、またはUR 10の協調型ロボットで組み立てることができ、付属の空気圧アクチュエーターとコンポーネントにより、ロボットの手首と空気圧動力源に直接接続できます。
GIMATIC ユニバーサルロボット用平行グリッパーKIT-UR-G

- 産業用途
ゴムカバーとコンデンサーボックスを備えた電動2本指平行グリッパー。このシステムは、UR3、UR5、またはUR10協調ロボットで組み立てることができ、付属のコンデンサボックスでロボットのリストに直接接続できます。
GIMATIC ユニバーサルロボット用平行グリッパーKIT-UR-J

- 産業用途
内蔵コンデンサボックス付き平行四辺形電動グリッパー。グリッパ ーはすべての共同のユニバーサルロボットに取り付けることができ、内蔵のコンデンサボックスによりロボットリストへの直接接続が可能になります。グリッパーは、短い開閉時間でのロングストロークに適しており、グリップ力はカスタマイズされたグリップフィンガーの長さに関わらず一定です。Gimaticが開発したURCapプラグインを取り付けることで、ユーザーはデバイスの構成が一度で済みます。グリップのための部品のリストが示され、グリップのタイプ(内部または外部)が規定され、それにより印加される負荷およびグリップポイントの座標が自動的に更新されます。またプラグインにより、複数のGimaticキットを同じロボ ット取り扱いプログラムから同時に管理することができます。
ニュースケールロボティクス社精密グリッパーNSR-PG-10-20-UR

- 産業用途
ニュースケールロボティクス社精密グリッパーNSR-PG-10-20-URは、URの小型共同のロボットのために最も精密な作業をこなすグリッパーです。
SMC ユニバーサルロボット用エアチャック
- 産業用途
SMC社エアチャックは高精度リニアガイドを搭載し、エアで駆動します。小形・軽量で外径把持力が32.7N、内部把持力が43.5Nと高把持力を発揮します。エア供給チューブ1本、電気配線M8コネクタを接続するだけで動作可能で、専用のURCapにより、直観的な操作で各種動作、センサー信号を簡単に積分できる可能です。
CWファイバーレーザー
DK LASER社 シングルモードCWファイバーレーザー(コア径14μm) SIRIUS

- 加工用途
- 産業用途
DK LASER社のシングルモードCWファイバーレーザー「DK SIRIUS」は、コア径14µm,M2<1.1のファイバーレーザーです。非常にエネルギー密度が高く、反射光に強い事も大きな特徴としており、銅やアルミニウムの溶接,3Dプリンティングなど様々なアプリケーションで効果的な加工が可能となっております。オプションの仕様にも対応可能です。
DK LASER社 マルチモードCWファイバーレーザー LEO

- 加工用途
- 産業用途
DK LASER社のマルチモードCWファイバーレーザー「DK LEO」は、特許技術である反射光防止機能により、銅やアルミニウムなど⾼反射材料のレーザー溶接や切断に最適なレーザー光源です。
コア径は、50μm、100μm、150μmにカスタマイズ可能です。
DK LASER社 リングモードファイバーレーザー ORION

- 加工用途
- 産業用途
DK LASER社のリングモードファイバーレーザー「DK ORION」は、シングルモード,マルチモード,シングル・マルチ同時出力モードの3つの出力モードを有しています。
最小ファイバーコア径14μmで、コア出力最大3kWまで可能です。
反射防⽌機能を有し、長時間安定した加⼯が可能となっています。
MiR社 AMR 自律走行型 搬送ロボット
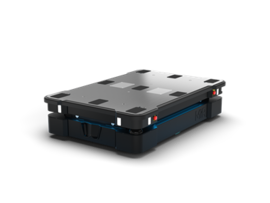
MIR社 MiR250 搬送ロボット
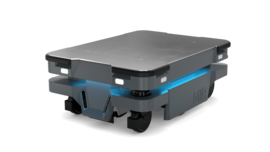
- 産業用途
MiR250は本体サイズ580 x 800 mmで、高さはわずか30センチメートル
でありながら、積載荷重250 kg。また、7.2km/時の速度で移動できます。
設置面積が小さいため、間口80cmでも走行できます。
今まで走行が困難だったドアやエレベーターは、MiR250では問題ありません。
さらに、安全基準により設計されているため、市場で最も安全な
AMRであると考えられています。
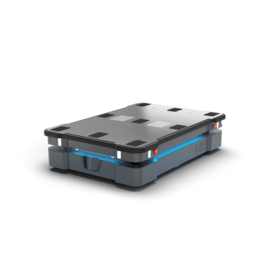
MIR社 MiR250 Shelf Carrier 搬送ロボット

- 産業用途
MiR250 Shelf Carrierは専用のカートを用いることで、最大300kgの可搬重量が可能となり、カートの回収と配送の自動化が可能となりました。
MIR社 MiR250 Hook 牽引最大500kg 搬送ロボット
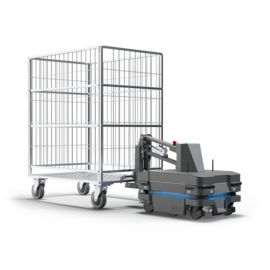
- 産業用途
MiR Hook 250TMにより、幅広い牽引作業が可能です。製造施設や倉庫内で、重量物を効率的に搬送したり、病院内でリネンや配膳カートを配送できます。MiR250フックは、最大総重量500 kgの搬送をサポートします。重量物や大型物品の構内搬送に新たなオプションを提供します。
MIR社 MiR600 搬送ロボット
- 産業用途
MiR600は、従来よりも高い堅牢性と安全性を誇るAMR(自律走行モバイルロボット)です。このロボットは、最高水準のロボット規格に準拠しており、市場に出回っている他のAMRを凌駕します。
MIR社 MiR1350 搬送ロボット
- 産業用途
MiR1350は、従来よりも高い堅牢性と安全性を誇るAMR(自律走行モバイルロボット)です。このロボットは、最高水準のロボット規格に準拠しており、市場に出回っている他のAMRを凌駕します。
防振プラットフォーム
マイナス k テクノロジー社minus k technology BM-1 ベンチトップ防振プラットフォーム

- 理化学用途
- 産業用途
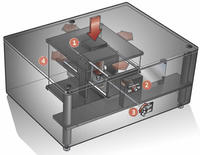
1 - 垂直振動は、ばねの4組のたわみとの相互作用によって分離される。装置の重量は、プリロードされたバネを圧縮し、アイソレータを浮かせ、フレクシャを整列させます。
2 - つまみOによって制御される別のばねからの締め付け力が、ねじを介してたわみの外側に加えられます。「圧縮された」撓みは、ばねの負のように作用する「負の剛性機構」(NSM)を構成し、システムの剛性を低下させます。
3 - 上下の柱板を接続する4本の梁柱が、水平方向の動きを分離するための水平方向のバネとして機能します。ビーム列は垂直に非常に堅いが、水平振動に応答してわずかに曲がり、偏向されたビーム列の重量は、ばねの剛性を減少させ、システムをNSMを備えたばねのように動作させます。
4 - クランクは、ペイロードの重量の変化を補償し、フレクシャをまっすぐに整列した位置に保つために、スプリングのベースを上下に動かします。スプリングの重さを増やす場合(重いものほど軽い顕微鏡を交換するなど)、クランクを時計回りに回してベースを上げる必要があります。
マイナス k テクノロジー社minus k technology BM-4 ベンチトップ防振プラットフォーム
- 理化学用途
- 産業用途
1 - 垂直振動は、ばねの4組のたわみとの相互作用によって分離される。装置の重量は、プリロードされたバネを圧縮し、アイソレータを浮かせ、フレクシャを整列させます。
2 - つまみOによって制御される別のばねからの締め付け力が、ねじを介してたわみの外側に加えられます。「圧縮された」撓みは、ばねの負のように作用する「負の剛性機構」(NSM)を構成し、システムの剛性を低下させます。
3 - 上下の柱板を接続する4本の梁柱が、水平方向の動きを分離するための水平方向のバネとして機能します。ビーム列は垂直に非常に堅いが、水平振動に応答してわずかに曲がり、偏向されたビーム列の重量は、ばねの剛性を減少させ、システムをNSMを備えたばねのように動作させます。
4 - クランクは、ペイロードの重量の変化を補償し、フレクシャをまっすぐに整列した位置に保つために、スプリングのベースを上下に動かします。スプリングの重さを増やす場合(重いものほど軽い顕微鏡を交換するなど)、クランクを時計回りに回してベースを上げる必要があります。
マイナス k テクノロジー社minus k technology BM-6 ベンチトップ防振プラットフォーム

- 理化学用途
- 産業用途
1 - 垂直振動は、ばねの4組のたわみとの相互作用によって分離される。装置の重量は、プリロードされたバネを圧縮し、アイソレータを浮かせ、フレクシャを整列させます。
2 - つまみOによって制御される別のばねからの締め付け力が、ねじを介してたわみの外側に加えられます。「圧縮された」撓みは、ばねの負のように作用する「負の剛性機構」(NSM)を構成し、システムの剛性を低下させます。
3 - 上下の柱板を接続する4本の梁柱が、水平方向の動きを分離するための水平方向のバネとして機能します。ビーム列は垂直に非常に堅いが、水平振動に応答してわずかに曲がり、偏向されたビーム列の重量は、ばねの剛性を減少させ、システムをNSMを備えたばねのように動作させます。
4 - クランクは、ペイロードの重量の変化を補償し、フレクシャをまっすぐに整列した位置に保つために、スプリングのベースを上下に動かします。スプリングの重さを増やす場合(重いものほど軽い顕微鏡を交換するなど)、クランクを時計回りに回してベースを上げる必要があります。
マイナス k テクノロジー社minus k technology BM-8 ベンチトップ防振プラットフォーム

- 理化学用途
- 産業用途
1 - 垂直振動は、ばねの4組のたわみとの相互作用によって分離される。装置の重量は、プリロードされたバネを圧縮し、アイソレータを浮かせ、フレクシャを整列させます。
2 - つまみOによって制御される別のばねからの締め付け力が、ねじを介してたわみの外側に加えられます。「圧縮された」撓みは、ばねの負のように作用する「負の剛性機構」(NSM)を構成し、システムの剛性を低下させます。
3 - 上下の柱板を接続する4本の梁柱が、水平方向の動きを分離するための水平方向のバネとして機能します。ビーム列は垂直に非常に堅いが、水平振動に応答してわずかに曲がり、偏向されたビーム列の重量は、ばねの剛性を減少させ、システムをNSMを備えたばねのように動作させます。
4 - クランクは、ペイロードの重量の変化を補償し、フレクシャをまっすぐに整列した位置に保つために、スプリングのベースを上下に動かします。スプリングの重さを増やす場合(重いものほど軽い顕微鏡を交換するなど)、クランクを時計回りに回してベースを上げる必要があります。
マイナス k テクノロジー社minus k technology CM-1コンパクト大容量防振

- 理化学用途
- 産業用途
1 - 垂直振動は、ばねの4組のたわみとの相互作用によって分離される。装置の重量は、プリロードされたバネを圧縮し、アイソレータを浮かせ、フレクシャを整列させます。
2 - つまみOによって制御される別のばねからの締め付け力が、ねじを介してたわみの外側に加えられます。「圧縮された」撓みは、ばねの負のように作用する「負の剛性機構」(NSM)を構成し、システムの剛性を低下させます。
3 - 上下の柱板を接続する4本の梁柱が、水平方向の動きを分離するための水平方向のバネとして機能します。ビーム列は垂直に非常に堅いが、水平振動に応答してわずかに曲がり、偏向されたビーム列の重量は、ばねの剛性を減少させ、システムをNSMを備えたばねのように動作させます。
4 - クランクは、ペイロードの重量の変化を補償し、フレクシャをまっすぐに整列した位置に保つために、スプリングのベースを上下に動かします。スプリングの重さを増やす場合(重いものほど軽い顕微鏡を交換するなど)、クランクを時計回りに回してベースを上げる必要があります。
マイナス k テクノロジー社minus k technology LC-4 超小型振動アイソレータ

- 理化学用途
- 産業用途
1 - 垂直振動は、ばねの4組のたわみとの相互作用によって分離される。装置の重量は、プリロードされたバネを圧縮し、アイソレータを浮かせ、フレクシャを整列させます。
2 - つまみOによって制御される別のばねからの締め付け力が、ねじを介してたわみの外側に加えられます。「圧縮された」撓みは、ばねの負のように作用する「負の剛性機構」(NSM)を構成し、システムの剛性を低下させます。
3 - 上下の柱板を接続する4本の梁柱が、水平方向の動きを分離するための水平方向のバネとして機能します。ビーム列は垂直に非常に堅いが、水平振動に応答してわずかに曲がり、偏向されたビーム列の重量は、ばねの剛性を減少させ、システムをNSMを備えたばねのように動作させます。
4 - クランクは、ペイロードの重量の変化を補償し、フレクシャをまっすぐに整列した位置に保つために、スプリングのベースを上下に動かします。スプリングの重さを増やす場合(重いものほど軽い顕微鏡を交換するなど)、クランクを時計回りに回してベースを上げる必要があります。
マイナス k テクノロジー社minus k technology WS-4 コンパクト防振テーブル

- 理化学用途
- 産業用途
| マイナス k テクノロジー社minus k technology WS-4 コンパクト防振テーブル |
| 1000 lb.および1/2 Hzの性能、垂直・水平の重量負荷用の費用対効果の高い防振テーブルです。 |
超小型6軸垂直多関節ロボットアーム
メカデミック社(MECADEMIC)超小型ロボットアーム MECA500

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
Meca500は±5μmと言う超高繰り返し位置精度を有する超小型の6軸ロボットアームです。コントローラが内蔵されたロボット本体のフットプリントは115×90mmと小さく、手のひらサイズのスペースがあれば設置可能です。
Meca500の操作は、Ethernetケーブルで接続したPCやPLCで行うことができます。また、MECA500とPCをEthernetケーブルで接続している場合、ウェブブラウザで専用のWebインターフェイスを起動して、MECA500を操作することもできます。
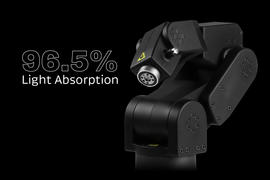
メカデミック社(MECADEMIC)光吸収型小型ロボットアーム MECA500-OBS
- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
高精度(繰り返いし位置精度 ±5μm)な小型6軸ロボットアームMeca500の筐体に、特殊な光吸収コーティングを施した光吸収型小型ロボットアームです。
波長300~650nmで吸収率96.5%
特に、フォトニクスデバイス/オプトエレクトロニクスデバイスを扱う作業やレーザーの光軸調整,光測定といった、ロボット表面で照明や測定光などが反射することを嫌う分野に適しています。
オートモバイルコボット
オートモバイルロボットActibo(アクティボ)

- 産業用途
MiR200とUReシリーズのコラボレーションでAMR搭載のユニバーサルロボットが離れた場所への荷物搬送や作業など、また人が近寄れない場所などへの作業が可能になります。
ロボット移動管理システムMiR Fleet
MiR Fleet ロボット管理システム(オプション)

- 産業用途
MiR Fleet なら、直観的なウェブベースのインターフェイスにより、すべての施設で単一のステーションからロボットを集中コントロールできます。
MiR用アクセサリー
シリコーンゴム感圧スイッチ(オプション)

- 産業用途
耐環境性・柔軟性に優れたシリコーンゴム素材
工場施設の安全基準に順応
ホロライト 防水・防塵性能IP66対応の小型LED照明 アーチ・ミニ

- 産業用途
バイフォトニクス社のホロライト・アーチ・ミニは、従来の10cm角のホロライト・アーチを6cm角と小型、軽量、低消費電力化した新しいLED照明です。消費電力を半分程度に抑える一方、光利用効率を向上させ十分な明るさを維持しています。防水防塵保護等級IP66とした屋外用を標準化しており、信頼性の向上および長寿命化を実現しています。
ROBOTIQ社パレタイジングシステム
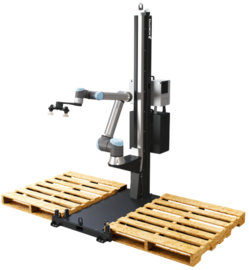
ROBOTIQ PE20(ユニバーサルロボット使用)

- 産業用途
ROBOTIQ社のパレタイジングシステム PE20は、ユニバーサルロボット社のUR20を搭載することが可能で、最大積載量 25kg(ハンドを除く)、最大積み付け高さ 2150mm のスペックを有する自動パレタイジングシステムです。
セットアップが容易なため、ロボットを初めて扱う方でもパレタイジングの自動化が可能です。
コンベアからパレットに梱包箱を積むパレタイジングは一般的ですが、難易度が高い逆方向のパレットからコンベアに梱包箱を移すデパレタイジングをカメラなしで提案することも可能です。
常温だけでなく5°Cの低温環境下でのシステム納入実績もございます。
ROBOTIQ AX10(ユニバーサルロボット使用)
- 産業用途
ROBOTIQ社のパレタイジングシステムは、ユニバーサルロボット社のロボットを用いた、自動パレタイジング(パレットへの荷積み)装置です。
最大積載量:12.5kg(吸着ハンド含む) ※ロボットアーム UR10e使用時
アプリケーションのセットアップはたった3つの手順を行うだけ!
1)荷物の寸法、重量、向きを設定
2)パレット寸法を設定
3)パレットのレイアウト作成
自動化を検討中の現場に導入しやすいシステムです。
ハイブリッドソリッドステート型ライダー
3D LiDAR (1550nm), 60°x 28.5°

- 産業用途
- 計測用途
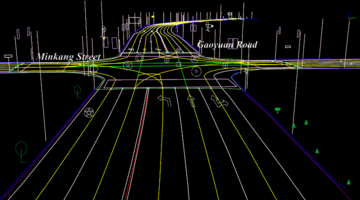
LS360S4 は、Leishen Intelligent System の2025年度の新製品になります。
120°x 25°の 3D LiDAR が主流の中、視野角をわざと 60°x 28.5°と狭くして600万の点群を詰め込んだユニークな製品になります。
最大 1500mまでの計測が可能になります。
縦横ともに狭いエリアで遠くまで見たい用途に最適です。
また、離れた距離でわずかな変化を見たい用途にも最適です。
鉄道車両の運転席に取り付け数 100m 先の障害物の検知、高速道路、国道など直線道路での障害物の検知、トンネル内の監視、建物、橋梁の遠隔監視、送電線、鉄塔の点検、空中のドローン検知などにもご利用いただけます。
3D LiDAR (1550nm), 120° x 73°

- 産業用途
- 計測用途
LS500W1 は、ファイバーレーザーを使用した3D LiDARになります。
視野角度が 120° x 73° と垂直方向を Leishen 社従来品 (25°) の3倍広げたワイドタイプになります。
480チャンネル、370万点群 / 秒 @10Hz と LiDAR 業界最高レベルの仕様になっております。
Max 150m (60m @反射率 10%), 反射率の低い黒色の対象物への検知にも優れております。
耐振動 (5Hz 2000 Hz, 3G rms)、耐衝撃 (500 m/sec², 11 ms) に対応、保護等級 IP6K9K により雨、粉塵の中での使用にも適しております。
発信するレーザーにコードを付加、他のLiDARとの相互干渉防止機能も備えております。
カメラ、ハウジング、産業用PC 、SDKを組み合わせた V2X システムのご提案もしております。
-
- 波長
- 1550nm
3D LiDAR (1550nm), 120° x 25°

- 産業用途
- 計測用途
LS180S3 / LS400S3 は、ファイバーレーザーを使用した3D LiDARになります。太陽光の干渉に強く屋外・長距離の計測に最適な3D LiDAR です。
Max 500m, 250m (反射率 10%), 反射率の低い黒色の対象物への検知にも優れております。
耐振動 (5Hz 2000 Hz, 3G rms)、耐衝撃 (500 m/sec², 11 ms) に対応、保護等級 IP6K9K により雨、粉塵の中での使用にも適しております。
発信するレーザーにコードを付加、他のLiDARとの相互干渉防止機能も備えております。
動きがあるものにはLS180S3 (10Hz)、静止に近いものにはLS400S3 (5Hz) をお勧めしております。
LS180S3 にカメラ、ハウジング、産業用PC 、SDKを組み合わせた V2X システムのご提案もしております。
-
- 波長
- 1550nm
3D LiDAR (905nm), 120°x 40°

- 産業用途
- 計測用途
CH256X1 は、縦方向を従来品の25°から 40°とワイドにしたにもかかわらず、2kg と小型、軽量を実現した 3D LiDAR になります。450m タイプと200m タイプの2種類ございます。
200m タイプは距離を半減にする代わりに、点群数を2倍の 307万点群 / 秒にし、業界最高レベルを実現しました。
交通システム (V2X)、監視システム、大型施設の人流解析等、高いところから見下ろし眺めて俯瞰する用途する用途に最適です。
耐振動 (5Hz~2000Hz, 3Grms)、耐衝撃 (500m/sec², 11ms) に対応、保護等級 IP67 により雨、粉塵の中での使用にも適しております。
Dual echoの機能により霧、雪の中でもその先の対象物の検知が可能になります。
発信するレーザーにコードを付加、他のLiDARとの相互干渉防止機能も備えております。
カメラ、ハウジング、産業用PC 、SDKを組み合わせた V2X システムのご提案もしております。
-
- 波長
- 905nm
3D LiDAR (905nm), 120°x 25°

- 産業用途
- 計測用途
CX128S2 は自動車用機能安全規格 ISO26262 (ASIL B) を取得したCH128S1の後継機種になります。
200m (反射率 10%), 小型、軽量 900g で車載用途に最適です。
点群数も前機種のCH128S1 の2倍にあたる153万点群 / 秒を実現。
耐振動 (5 Hz 2000 Hz, 3G rms)、耐衝撃 (500 m/sec², 11 ms) に対応、保護等級 IP6K9K により雨、粉塵の中での使用にも適しております。
Dual echoの機能により霧、雪の中でもその先の対象物の検知が可能になります。
発信するレーザーにコードを付加、他のLiDARとの相互干渉防止機能も備えております。
CX126S3 は CX128S2 よりさらに小型、軽量 635g になります。黒色の対象物の検知に優れております。道路・アスファルトの白線の検知も可能になります。
両製品ともにカメラ、ハウジング、産業用PC 、SDKを組み合わせた V2X システムのご提案もしております。
-
- 波長
- 905nm
機械回転式 3D LIDAR
2D, 3D LiDAR (905nm), 360° タイプ

- 産業用途
- 計測用途
360° 全方位に対応する回転式 3D LiDAR になります。
100m (10%) で、スキャンするレーザーの本数を 32, 16, 8, 1 の4種類から選ぶことができます。
(レーザーの本数が1の場合は2D LiDARの機能になります。)
車載、ADAS、交通システム、フォークリフト、自律走行搬送ロボット(AMR)、物流、マッピング技術、セキュリティなどの分野に広く使われています。
また、垂直角度を 70°(-55 ~ +15°) まで広げた製品 (C32W) は設置したLiDARの足元のスキャンが可能になり、近距離の障害物の認識により死角を大幅に減らすことができるようになりました。
2D, 3D LiDAR (905nm), 180° タイプ

- 産業用途
- 計測用途
水平視野角 180° に対応する2D, 3D LiDAR になります。
スキャンするレーザーの本数を 64, 1 の2種類から選ぶことができます。
(レーザーの本数が1の場合は2D LiDARの機能になります。)
64: 45m (10%)
1: 100m (10%)
長距離 LIDAR センサー
LSLIDAR 長距離視覚調整可能測距システム LiDAR LS30MVA

- 産業用途
- 計測用途
LS30MVA はレーザー距離計、カメラ、角度変位を測定するシステムで構成されております。
外部からの力でシステムが前後方向(ピッチ方向)に動いても、自動的にレーザーを水平方向に戻す機能があります。
カメラの光軸はレーザーと平行に設定され、レーザー距離計で対象物を捕捉した際には、カメラで直接確認することが可能になります。
-
- 波長
- 1550nm
TOF 単 線 2D LIDAR センサー
M10 シリーズナビゲーション&障害物回避ライダー

- 産業用途
- 計測用途
M10 は工業レベルの 2D LiDAR センサーで、360°の高精度感知能力を持っています。 ロボットのナビゲーション、同期位置決め、障害物回避などに使用されています。検 出距離は 10mまでです。そのスマートシステムが集積されたコンパクトな LIDAR は お客様に大きな利益をもたらしました。
-
- 波長
- 905nm
LSLIDAR ナビゲーション&障害物回避ライダー N301/N401

- 産業用途
- 計測用途
N 301/N 401 は TOF 原理を採用して、360°走査して、測定距離は 50 m に達することができ、 リアルタイムで測定物体の位置、大きさと運動方向を識別することができます、また、衝撃、振 動に強く、広範にサービスロボットの高精度の自主的な位置付けとナビゲーションに応用して、 AGV ナビゲーションと障害物回避、区域安全などを応用されます。N 401 は高反射または低反射 物体を識別でき、主に AGV または反射板付きの無人フォークリフトのナビゲーションに適用され ます
-
- 波長
- 905nm
LSLIDAR 衝突防止警報 LiDAR W シリーズ

- 産業用途
- 計測用途
W シリーズの衝突防止 LiDAR センサーは、主に AGV、RGV、ロボットなどの衝突回避と
領域検出場面に応用されています。
実際の使用環境に応じて測定範囲内で自由に 15 個の エリアを設定できます。
最後にスイッチング量信号と点雲データを出力します。
独立型と相関型の二つの検出モードがあり、様々な衝突防止シーンをカバーしています。
-
- 波長
- 905nm
フェムト秒レーザー
MPB Communications社 フェムト秒ファイバーレーザー

- 加工用途
- 医療用途
- 微細用途
- 理化学用途
- 産業用途
MPB Communicationsの高出力モードロックフェムトファイバレーザーは、920nm又は1190nmで発振する2機種がございます。小型でメンテナンスフリーのファイバーベースであり、非常に良好なビームプロファイルを有します。
-
- 波長
- 920nm・1190nm
-
- 出力
- 1W
LUXINAR(IRADION) ルクシナー(イラディオン)
低出力 超小型CO2レーザー ETERNITY(25~70W)

- 加工用途
- 理化学用途
- 産業用途
Eternityシリーズは、低出力 超小型CO2レーザーです。
E70は、出力70Wでありながら、E25(25Wタイプ)と同じ筐体サイズという超小型レーザーで、ロボットアームに取り付けて様々なレーザー加工アプリケーションでご利用いただけます。
水冷タイプのEternity
LUXINAR(IRADION)が特許を有するCERAMICORE(セラミコア)® の共振器構造は、従来の共振器構造と違い、金属電極がレーザーガスに接していないため、レーザーガスの劣化が少なく、長寿命,高出力安定性,高ポインティングスタビリティ,高ビーム品質,高パルス特性のレーザービームが得られます。
小型のため、既存のCO2レーザーとの置き換えも容易に行えます。
オプションで専用コントローラやビームエキスパンダなどもございます。
-
- 波長
- 9.3μm / 10.2 μm / 10.6 μm / 11.2μm
-
- 出力
- 25~70W
中出力 小型CO2レーザー INFINITY(50~150W)

- 加工用途
- 理化学用途
- 産業用途
Infinityシリーズは、50~150Wの幅広い出力が選べる小型CO2レーザーです。
LUXINAR(IRADION)が特許を有するCERAMICORE(セラミコア)® の共振器構造は、従来の共振器構造と違い、金属電極がレーザーガスに接していないため、レーザーガスの劣化が少なく、長寿命,高出力安定性,高ポインティングスタビリティ,高ビーム品質,高パルス特性のレーザービームが得られます。
小型のため、既存のCO2レーザーとの置き換えも容易に行えます。
オプションで専用コントローラやビームエキスパンダなどもございます。
-
- 波長
- 10.2 μm / 10.6 μm
-
- 出力
- 50W~150W
40μs 小型CO2レーザー INFINITY PLUS(50~120W)

- 加工用途
- 理化学用途
- 産業用途
Infinity Plusシリーズは、Infinityよりもさらに安定性が高く、パルスの立ち上がり/立ち下がり時間が短いため、高速加工や高品質が求められる加工に適しています。
出力タイプも50~120Wと幅広く、発振波長も10.6 / 10.2 /9.3 µmから選ぶことができます(120Wタイプは10.6μmのみ)。
LUXINAR(IRADION)が特許を有するCERAMICORE(セラミコア)® の共振器構造は、従来の共振器構造と違い、金属電極がレーザーガスに接していないため、レーザーガスの劣化が少なく、長寿命,高出力安定性,高ポインティングスタビリティ,高ビーム品質,高パルス特性のレーザービームが得られます。
小型のため、既存のCO2レーザーとの置き換えも容易に行えます。
オプションで専用コントローラやビームエキスパンダなどもございます。
-
- 波長
- 9.3μm / 10.2 μm / 10.6 μm
-
- 出力
- 50W~120W
高出力 小型CO2レーザー DESTINY(200/250W)

- 加工用途
- 理化学用途
- 産業用途
Destinyシリーズは、他メーカーの同出力製品と比べて、非常にコンパクトな加工機用高出力CO2レーザーです。
LUXINAR(IRADION)の他のモデル(低出力・中出力タイプ)と比べてもそれほどサイズに差はありません。
そのため、同じ出力レベルのCO2レーザーとの置き換えも容易に行えます。

LUXINAR(IRADION)が特許を有するCERAMICORE(セラミコア)® の共振器構造は、従来の共振器構造と違い、金属電極がレーザーガスに接していないため、レーザーガスの劣化がなく、長寿命,高出力安定性,高ポインティングスタビリティ,高ビーム品質,高パルス特性のレーザービームが得られます。
オプションで専用コントローラやビームエキスパンダなどもございます。
-
- 波長
- 10.2 μm / 10.6 μm
-
- 出力
- 200W / 250W
CO2レーザー応用例

- 加工例一覧
- 加工用途
- 産業用途
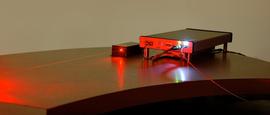
LUXINAR(IRADION)のCO2レーザーを用いたアプリケーション例の紹介です。
エル・ビー・ウエルド株式会社様の『ロボレーザ樹脂加工セル』は、LUXINAR(IRADION)製CO2レーザーを、FANUC社製小型ハンドリング知能ロボット(M-20iD)に搭載したコンパクトな樹脂加工装置です。ロボットアームにレーザー光源を取り付けたことで、自由度の高い、高速・高品質の樹脂加工が可能となっています。
LUXINAR(IRADION)のCO2レーザーが、高出力でありながら軽量・小型であることから実現した加工装置です。
自動バレーパーキングロボット・自動車工場向け車両搬送ロボット
Drifting Combo

- 産業用途
スマートフォンによるリモコン操作、もしくは完全無人型の全自動での遠隔操作が可能。
2025年発表の1st gen Drifting COMBO では、横移動(カニ歩き)、その場回転(コマ回り)の機能を追加、2026年発表の 2nd gen Drifting COMBO ではモーターを前後ロボットそれぞれ2つ、合計4つに増量し、力強い走りが可能になりました。
坂道は最大 10% (5.7°) まで対応、一方搬送中のタイヤの脱輪は極力少ない設計になっております。
リモコンでの操作は、対象となる自動車の正面、もしくは側面の50cmあたりまで移動させ、あとはボタンを押すだけで勝手に縦方向、横方向から自動で車両の下に潜り込み、タイヤをクランプして浮かせる作業をいたします。リモコンでの車両搬送後も、ボタンを押すだけで勝手に車両を地面に置きロボットが車両から50cmあたりのところまではい出てきます。少ないボタン操作で直感的な操作が可能になります。
横移動(カニ歩き)、その場回転(コマ回り)の機能が追加された新型のデモ機は、2026年3月に到着しました。横浜市都筑区の当社建屋前の駐車場にてデモ・実験が可能になります。
日本と違い中国では電気自動車 (EV) が多く、充電設備での火災事故にも悩まされています。
火災事故の際に燃えた車両を充電設備から遠ざける、または他の車両を燃えた車両から遠ざける用途でも中国国内で引き合いがあり、特別仕様で耐火性の部品で固めたタイプも製造しております。
Turbo

- 産業用途
スマートフォンによるリモコン操作、もしくは完全無人型の全自動での遠隔操作が可能。
最大3.5t までの車両を2m / 秒で移動させることができます。
フル充電で6時間の操作ができます。
ソリューションビジネス
3D SLAM無人フォークリフトシステム

- 産業用途
LiDARセンサーの総合メーカーであるLeishen社は、LiDARの応用分野としてフォークリフトの自動化ソルーションを推進しています。
<背景>
消費や生産のグローバル化が世界規模で急速に拡大する中に有って、物流のDX化が待った無しの状況に於かれております。物流の世界に於ける人材の確保や、環境の安全維持は重要な課題となって居ます。
その様な環境下にあって、Leishen社は、LiDARテクノロジーの応用技術を用いて、フォークリフトメーカーの要望に応えるべく、自動化を推進する専門組織を設置し、マニュアルフォークリフトの自動化UNITをパッケージとして準備し、ビルトイン技術と共に提供する、ソルーションビジネスを展開して居ります。
Cobot Lift社パレタイジングシステム
Cobot Lift(ユニバーサルロボット使用)

- 産業用途
可搬重量:5~45kg
| 固定式コボットリフト | 移動式コボットリフト |
床に取り付けるアンカータイプです。  | アンカーレスで、設置場所を変えることができるタイプです(自律走行型ではありません)。  |
Preferred Robotics プリファード・ロボティクス社
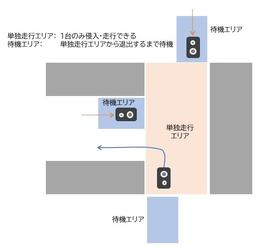
小型自律搬送ロボット カチャカプロ 製造業向けソリューション

- 産業用途
小型自律搬送ロボット カチャカプロは、専用の棚(シェルフ)とドッキングして必要なものを必要な場所に運ぶ、業務ユース特化型の自律走行搬送ロボット(AMR)です。小型・低コスト・簡単操作という3つの特徴を持っています。
カンタム・ウシカタ株式会社は、工場内物流を低コストで自動化する製造業向けのソリューションとしてご提供します。20Kg程度の電子部品や樹脂材料等の搬送に使用できます(シェルフ重量を除く搬送重量)。
カチャカフリートマネージャー New!
- 産業用途
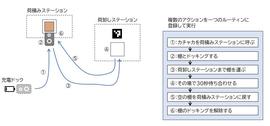
複数台のカチャカを効率的に稼働させるためのシステムです。
稼働状況の一覧表示、交通ルール設定(管制管理機能)、効率的なタスクの割当(配車管理機能)、カチャカボタンとの連携(ボタン一つで最適配車・搬送)により、製造現場での様々なご要求にも簡単にかつリーズナブルに、複数台のカチャカを使用可能です。
カンタム・ウシカタ株式会社は、自律走行型搬送ロボットの豊富な販売実績と設置経験により、様々な製造業の現場に適したシステム提案が行えます。またスムーズな導入と運用をサポート致します。
最新のカチャカで何ができる?
- 産業用途
カチャカはソフトウェアアップデートにより、日々進化しています。
カンタム・ウシカタ株式会社は、製造業の現場に有用な新機能をいち早くご使用いただけるよう、サポート致します。
除菌装置
除菌用UVライト222nm eVIO(エヴィオ)

- 医療用途
- 理化学用途
- 産業用途
eVIOは、紫外線本来のウィルス抑制・除菌能力を保持したまま
人や動物の身体への影響を抑える先進技術によって、従来の
紫外線波長では不可能だった有人環境下での使用を実現した
全く新しい紫外線ライトです
-
- 波長
- 222 nmm
ORBBEC社製品
ORBBEC Gemini 330 シリーズ

- 産業用途
- 計測用途
Orbbec の最新カスタム ASIC MX6800 を搭載した Gemini 330 シリーズは、アクティブおよびパッシブ ステレオ ビジョン技 術を組み合わせて、真っ暗から直射日光まで、ダイナミックな環境やさまざまな照明条件で一貫した高品質の深度データを提 供します。このシリーズは、60 FPS で最大 1M の解像度、100° を超える視野、最大範囲 20 メートル以上を提供し、AMR、検 査ロボット、配送ロボット、ヒューマノイド ロボット、ロボット アーム、ドローン、人体再構成などの屋内および屋外のアプリケー ションに最適です。
ORBBEC TOFカメラ フェムト シリーズ

- 産業用途
- 計測用途
Orbbec社の「Femto」シリーズは、高性能な3Dカメラ製品群で、Femto Bolt や Femto Mega といったモデルがあります。
ORBBEC Astra シリーズ

- 産業用途
- 計測用途
Orbbec社は、構造化光技術を用いた高品質な3Dカメラを提供しています。その代表的な製品であるAstraシリーズは、Orbbec独自のASICを搭載し、高精度な深度処理を実現しています。
最新モデルのAstra 2は、構造化光技術とカスタムASIC MX6600を活用し、前モデルと同様の視野角(FoV)と深度測定範囲を維持しつつ、光学システムのアップグレードにより精度と安定性を向上させています。
ORBBEC カメラコンピューター(ぺルセ)

- 産業用途
- 計測用途
Orbbec社は、3Dビジョン技術を活用したカメラコンピューターを提供しています。これらのデバイスは、3Dカメラとコンピューターを一体化したもので、ロボティクスやAIビジョンなどの分野で活用されています。
ORBBEC カメラアクセサリー

- 産業用途
- 計測用途
ORBBEC社は、3Dカメラや深度センサー技術を提供しており、これらのデバイスをサポートするアクセサリーも取り扱っています。公式オンラインストアでは、カメラアクセサリーのカテゴリが設けられており、各種アクセサリーが提供されています。
空間測量用 3D スキャナ
送電線・鉄塔・電柱の点検、解析

- 産業用途
- 計測用途
送電、変電、配電の点検、解析を日々の作業の細かいところまで想定した製品になります。
膨大な点群データを処理・分析し、問題個所を迅速かつ正確に抽出できます。動作状態の早期警告分析、送電線完成検査、複数期間データ分析、詳細な検査ルート計画などの機能を提供し、電力システムの安全な運用が可能になります。
GreenValley Internationalが開発したソフトウェア LiPowerline、およびドローンに取り付けるハードウェア LiAir X4 でご購入後すぐにご使用が可能になります。
 |
 |
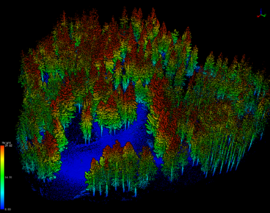
林業・森林調査
- 産業用途
- 計測用途
近年の LiDAR 技術の進歩により、林業、森林調査での個々の樹木のデータ収集がかなり容易になりました。GreenValley International が開発したソフトウェア LiDAR360、およびハードウェアでは背中に背負って地上から計測を行う LiBackpack DGC50H、ヘリコプター・ドローンに取り付けて空中から計測を行う LiAir X4 を使うことでご購入後すぐにご使用が可能になります。地上と空中からの点群画像を重ね合わせて解析することもできます。
森林資源・森林バイオマスの正確な把握、都市空間での樹木の量の確認、樹木の種類の識別機能を使った単一の樹木の点群データ・パノラマ画像の作成、さらに樹木の炭素吸収能力の確認に最適です。
 |
 |
車両搭載型測量システム

- 産業用途
- 計測用途
近い将来に実現する自動運転には必ず高精度の3D 地図データが必要になります。また今後の国内の道路維持管理においても、膨大な保守点検箇所を効率的に見つけることが必要になります。
GreenValley International のソフトウェア LiDAR360MLS、および車両の天井に取り付けるハードウェア LiMobile M2 は、道路を走りながら効率的に計測するモバイルマッピングシステム (Mobile Mapping System: MMS) の用途で開発しました。道路の保守点検箇所の確認、道路の拡張工事、自動運転向けの高精度地図の作成、都市空間のデジタルツインの作成に最適です。
 |
 |
3Dスキャナ
ハンドヘルド型 3D スキャナ
- 産業用途
- 計測用途
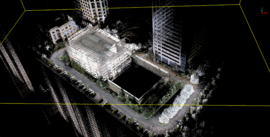
カンタム・ウシカタが2025年4月より取り扱いを始めた GreenValley International の手持ち式 3D スキャナ LiGrip O2 Lite になります。 1.3kg と軽量、70m までの測量、予備バッテリーとあわせて4時間の連続使用が可能になります。 屋内での測量、屋外でもドローン飛行禁止区域、かつMMS搭載の車両も入れない場所での測量に最適です。
通常のSLAM技術では凹凸が少なく変化の少ない単調な空間、建物が続く場所では自己位置推定の能力が低下することがあります。トンネル、長い廊下、広く開けた野原、河川敷、海岸では難しいと言われています。本製品では複数のセンサを使うVisual SLAM (VSLAM) の機能を導入しこの問題を克服、正確な地図作成が可能になります。 GNSS が使えない地下空間での使用もOKです。
他社品と比べ処理速度も速く、おおよそ1:2 になります。 たとえば、10分の計測なら、GreenValley Internationalのソフトウェアでの処理に20分、その後、解析、検証が可能になります。
2026年に Visual SLAM の機能を省いた廉価版 (LiGrip SE) を発表しました。よりお求めやすい価格でご提供が可能になります。
 |
 |
LiGrip SE |
4XROBOTS
4XROBOTS

- 産業用途
4XROBOTSが開発したパラレルリンクロボット(高速多関節ロボット)は、最大1000mm/秒の速度で動作可能で、農業・園芸・造園・植物研究などの分野をはじめ、パッケージされた食品のピックアンドプレースなど様々な分野で作業効率を向上させることができます。
また、協働ロボットでもあることから安全に利用することができます。
ハイパースペクトルカメラ
ULTRIS XMR / XMR-GP

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
ULTRIS XMRは、Cubertの産業用フラッグシップカメラです。ふつうのカメラが赤・緑・青の3色で記録するのに対し、本機は光を61の波長に分けて捉えるため、肉眼では見分けられない素材の違いまで画像にできます。
1メガピクセル(1080×1000画素)の高解像度で、USB3による高速転送に対応。AIを使った外観検査などに適しています。
派生モデルのXMR-GPは、顕微鏡や内視鏡と組み合わせて使えます。
ULTRIS X20 / X20 Plus

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
ULTRIS X20ファミリーは、目に見える光に加えて紫外線・近赤外線まで(350〜1000nm)の広い範囲を、164もの波長に分けて捉えるカメラです。肉眼やふつうのカメラでは分からない違いを画像にできます。
「どの波長が判別に役立つか」を探る研究に向く『X20』と、画像をより精細に仕上げてドローン空撮の地図づくりに使える『X20 Plus』の2モデルがあります。
大学・研究機関やUAVを使った測量の用途に適しています。
ULTRIS S5 / H5 / SR5 / HR5

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
ULTRIS 5ファミリーは、手のひらサイズで軽量(約120g)なハイパースペクトルカメラです。光を細かな波長に分けて捉える性能はそのままに、小型・低コストを実現し、ドローンや装置への組み込みに向いています。用途に合わせて、標準モデルのほか、顕微鏡や内視鏡につなげる『Relay』、動きのある対象を高速で撮れる『HFR』を選べます。医療・ライフサイエンス分野でも使われています。
ULTRIS SWIR 1

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
ULTRIS SWIR 1は、目に見えない「短波赤外(SWIR)」という光(980〜1650nm)を捉えるカメラです。見た目がそっくりで肉眼では区別できない水分・有機物・プラスチックなどの違いを、はっきり見分けられます。動く対象にも対応する高速撮影(最大80Hz)と、約140gの軽さが特長。プラスチックの選別やリサイクル、食品・農業の検査などに使われています。
医療用途

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
通常の医療画像は構造・色・形を捉えますが、組織の酸素状態や分子レベルの変化は捉えられません。ハイパースペクトルイメージング (HIS) は各画素にスペクトル情報を付加し、灌流・色素・組織性状を定量的に評価できる新しい情報層を提供します。造影剤を使わずに血流や酸素飽和度を可視化できる点が大きな特長です。
マシンビジョン・産業検査用途
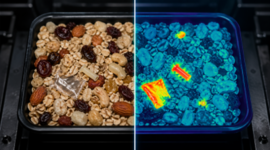
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
従来のマシンビジョンカメラでは形状を認識しますが、見た目が同じで材質が異なるものは識別できません。ハイパースペクトルカメラを使うことで化学組成・濃度・品質マーカーといった「目に見えない特性」を測定可能にします。スナップショット方式のため、コンベア上を流れる対象でもブレなく撮像でき、AIパイプラインと組み合わせてリアルタイムの品質判定が可能になります。
リモートセンシング・ドローン計測用途
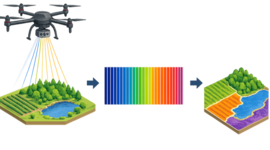
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
あらゆる素材は固有のスペクトル指紋を持ちます。Cubert の UAV 向けスナップショット型ハイパースペクトルカメラは、1回の撮像で1つの完全なスペクトルキューブ=1つの景観を取得します。ライン走査が不要なため、植生ストレス・土壌・水質などを面的に把握できます。10年以上にわたる UAV ハイパースペクトル・モザイク計測の実績がございます。
DJI の Matrice 300 / 350 RTK には対応済み、400 に対応予定です。
アメリカ国防省認定 Blue 対応が必要な際は、Freefly Systems の Freefly Astro / Astro Max に対応しています。
防衛・セキュリティ用途
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
ハイパースペクトルカメラを使うことで、肉眼ではわからない素材特性・塗膜・カモフラージュを遠隔から測定可能にします。移動対象に対してリアルタイムでスペクトル指紋を取得することで、視覚的カモフラージュに惑わされることなく AI と組み合わせて運用が可能になります。
高出力可視域CWレーザ(465nm~775nm)
MPB Communications社 高出力CW 606nm レッド(赤色)レーザー
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
独自のラマンアンプを用いて数W出力のCW発振が可能なレーザーです。SHG変換も含めて全てオールファイバーベースのため、極めて高い安定性を誇ります。
-
- 波長
- 606nm
-
- 出力
- 300mW, 500mW, 1000mW, 2000mW
MPB Communications社 高出力CW 647nmレッド(赤色)レーザー
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
独自のラマンアンプを用いて数W出力のCW発振が可能なレーザーです。SHG変換も含めて全てオールファイバーベースのため、極めて高い安定性を誇ります。
-
- 波長
- 647nm
-
- 出力
- 300mW, 500mW, 1000mW, 1500mW
MPB Communications社 高出力CW 670nmレッド(赤色)レーザー
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
独自のラマンアンプを用いて数W出力のCW発振が可能なレーザーです。SHG変換も含めて全てオールファイバーベースのため、極めて高い安定性を誇ります。
-
- 波長
- 670nm
-
- 出力
- 300mW, 500mW, 1000mW
MPB Communications社 高出力CW 703nmレッド(赤色)レーザー

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
独自のラマンアンプを用いて数W出力のCW発振が可能なレーザーです。SHG変換も含めて全てオールファイバーベースのため、極めて高い安定性を誇ります。
-
- 波長
- 703nm
-
- 出力
- 300mW, 500mW
MPB Communications社 高出力CW 750nmレッド(赤色)レーザー
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
独自のラマンアンプを用いて数W出力のCW発振が可能なレーザーです。SHG変換も含めて全てオールファイバーベースのため、極めて高い安定性を誇ります。
-
- 波長
- 750nm
-
- 出力
- 300mW, 500mW
MPB Communications社 高出力CW 775nmレッド(赤色)レーザー
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
独自のラマンアンプを用いて数W出力のCW発振が可能なレーザーです。SHG変換も含めて全てオールファイバーベースのため、極めて高い安定性を誇ります。
-
- 波長
- 775nm
-
- 出力
- 300mW, 500mW
XYステージ
XYグラナイトステージ

- 加工用途
- 微細用途
- 産業用途
- 計測用途
グラナイトベースにリニアモーターを用いた超高精度XYステージにより、超短パルスレーザーを用いた微細加工に有力です。コントローラはイスラエルのACS社とのジョイントベンチャーであるBusch ACS 社を設立し、より精密加工の仕様に応えることができます。
詳しくはBusch Microsystemsの特設サイトを御覧下さい。
ユニバーサルロボット用ビジョンシステム
ロボティック社ROBOTIQ ユニバーサルロボット用ロボットリストカメラ

- 産業用途
ロボテック社ROBOTIQのリストカメラは、ユニバーサルロボットによる産業用途向けに設計されています。新しい部品をプログラミング後、すばやく特徴を検出できるため、確実にピッキングを再現できます。
OnRobot社 ユニバーサルロボット用ビジョンシステムOnRobot Eyes

- 産業用途
- 計測用途
OnRobot社 Eyesでは、高い信頼性のロボットアームを使用し、非構造化アプリケーションを簡単に分類、選択、配置できます。Eyesはロボットアームまたは外部構造に取り付けられ、アプリケーションに合わせて位置を調整でき、クイック OnRobot チェンジャーを介しロボットインターフェースやグリッパーとシームレスに統合できます。新しい製品やプロセスへの切り替えダウンタイムは最小限で処理します。例えば1画像のキャリブレーションと部品認識はわずか数分、プログラミングは直感的で高速です。さらに、Eyesの高度で手頃な価格の2.5Dビジョンにより、簡単に奥行き認識とパーツの積み重ねが可能です。
LMI Tecnologies社ユニバーサルロボット用3Dロボットビジョン GOCATOR

- 産業用途
- 計測用途
「3次元スマートセンサーGocator」は、本体のみで3次元寸法測定や画像処理を使用した合否判定行うことができるオールインワン3次元スマートセンサーで、近年自動車業界や農業、食品などあらゆる業界でのニーズが高まっています。本体にWebサーバーが内蔵されており、LANケーブルにより、PCを接続するだけでブラウザ上から全ての設定、画像処理などのプログラミングを行うことができます。
Gocatorスナップショットセンサーは、単一のスキャントリガーで高密度の3Dデータを生成するステレオ構造のライトスキャナーを使用します。各センサーは、オンボードのデータ処理、組み込みの3D測定ツール、意思決定ロジックを提供し、最大6 kHzの速度でストップ/ゴーモーションでパーツフィーチャーをスキャンおよび検査します。
さまざまなファクトリオートメーションアプリケーションでスナップショットセンサーを使用できます。これらのメトロロジーグレードセンサーとURデバイスを組み合わせて、ロボットビジョンガイダンス、品質管理検査、スマートピックアンドプレースによる自動アセンブリで高性能の3D結果を実現する完全なロボットソリューションを実現します。
センサーとロボットの統合は、Gocator URcapプラグインを使用でき、容易です。Gocator 3DスナップショットセンサーでロボットをFactorySmartに。
ジック社SICK ユニバーサルロボット用ビジョンセンサーPIM60 Bead

- 産業用途
ジック社のInspectorは、センサ感覚で簡単に使えるインテリジェントビジョンソリューションです。
ジック社SICK ユニバーサルロボット用部品位置検出センサーPLOC2D

- 産業用途
- 計測用途
PLOC2Dは、2Dパーツ位置特定向けのビジョンシステムです。簡単に操作可能なセンサシステムは、高性能位置特定アル
ゴリズムと共に高品質の画像処理ハードウェアを搭載しており、信頼性が高く迅速なパーツ位置特定を保証します。センサ
システムの筐体は保護等級IP65です。PLOC2Dは、ロボット制御装置またはPLCと直接接続されるため、すぐに始動できま
す。直観的なユーザインタフェースは、製品環境のPLOC2Dのセットアップやメンテナンスを簡単に行うことができるよう
に設計されています。
協働ロボットアーム UR series
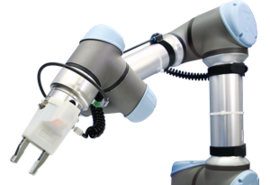
ユニバーサルロボット社(Universal Robots) UR30

- 加工用途
- 理化学用途
- 産業用途
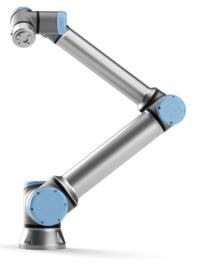
UR30は、30kgの可搬重量と1300mmのリーチを持つ高性能な協働ロボットです。
可搬重量30kgでありながらコンパクトサイズなため、限られたスペースでも、マシンテンディングやパレタイジングなどで重量物を扱うことが可能です。
<導入用途例>
- 重いワークの搬送
- マシンテンディング
- 高トルクねじ締結
ユニバーサルロボット社(Universal Robots) UR20

- 加工用途
- 理化学用途
- 産業用途
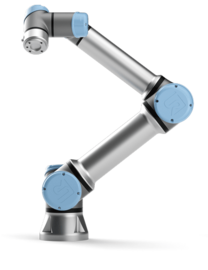
UR20は、20kgの可搬重量と1750mmのリーチを持つ高性能な協働ロボットです。
パレタイジングからマシンローディングにいたるまで、さまざまな用途でご利用頂けます。
<導入用途例>
- 重い部品のピッキング
- パレタイジング
- マシンテンディング
- マテリアルハンドリング
ユニバーサルロボット社(Universal Robots) UR18

- 加工用途
- 理化学用途
- 産業用途
UR18は、大型エンドエフェクターに対応していながら(可搬重量18kg)、ガントリーシステムへの搭載も可能な協働ロボットです。
ユニバーサルロボット社(Universal Robots) UR15

- 加工用途
- 理化学用途
- 産業用途
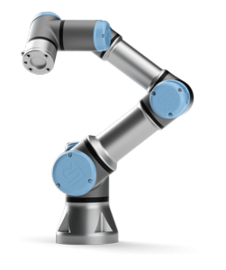
UR15は、最高速度5m/秒を実現した、高速協働ロボットです。
協働ロボットの弱点である“サイクルタイム”を短縮する事ができ、生産性向上が期待できます。
ユニバーサルロボット社(Universal Robots) UR8 long

- 加工用途
- 理化学用途
- 産業用途
UR8 Long は、コンパクトでありながら1750 mmという長いリーチを有する協働ロボットです。
溶接などロボットを作業場所から離れた所に設置したいアプリケーションに適しています。
ユニバーサルロボット社(Universal Robots) e-series UR16e

- 加工用途
- 理化学用途
- 産業用途
16kgの可搬重量を有し、リーチ半径900mm。将来を見据えた柔軟性の高い自動化を検討しているユーザー様に対して、協働の技術革新や、使う人の観点で満足度の高いロボットユーザー経験の実現、そしてあらゆる用途にURロボットと周辺機器のエコシステムを提供します。
<導入用途例>
- 高搬送重量のマシンテンディング
- 重い材質のハンドリング
- 梱包およびパレタイジング
- 高トルクねじ締め
- 研磨、バフがけ、バリ取り
- 自律移動ロボットとのコラボ応用
ユニバーサルロボット社(Universal Robots) e-series UR12e
- 加工用途
- 理化学用途
- 産業用途
可搬重量が10 kgから12.5 kgにパワーアップ!
リーチ半径最大1300mmながら高精度!
梱包やパレタイジングなどにも優れた機能を発揮します。
<導入用途例>
- ピック・アンド・プレイス
- 研磨
- 射出成形
- CNC
- 梱包およびパレタイジング
- 組み立て
- 接着、溶接
ユニバーサルロボット社(Universal Robots) e-series UR7e
- 加工用途
- 理化学用途
- 産業用途
7.5kgの可搬重量,リーチ半径850mmの軽量工程の自動化に最適な協働ロボットで、あらゆる生産現場の工程へシームレスに統合できるように設計されています。
<導入用途例>
- ピック・アンド・プレイス
- 研磨
- 射出成形
- CNC
- 梱包およびパレタイジング
- 品質検査
- 組み立て
- マシンテンディング
- 研究機関における分析と試験
- 接着、溶接
ユニバーサルロボット社(Universal Robots) e-series UR3e
- 加工用途
- 理化学用途
- 産業用途
小型ながらも強力。可搬重量は3 kg、リーチ半径は500 mm。すベてのエンドジョイントは360度回転し、先端のエンドジョイントは無制限に回転します。UER3eは省スペー スで 精度な実装を要する軽量部品の組み立て作業や、卓上作業の自動化などに最適です。
<導入用途例>
- 小さなオブジェクトの設置・接着
- ネジ止め
- 工具の操作
- はんだ付け
- 塗装
ユニバーサルロボット用システム
Realtime Robotics ロボット衝突回避システム

- 産業用途
人間の作業者や他のロボットなどが付近で動きまわるダイナミックな環境では相互作業が非常に困難となります。Realtime Roboticsはその困難を自動で回避するシステムを開発しています。
〈導入用途例〉
- スポット溶接
- アセンブリ
- パーツ転送
- マシンテンディング
- 掘削/ねじ込み
- ピックアンドプレイス
- パレタイズ
- キッティング
- 検査 等
ユニバーサルロボット用エンドエフェクター
ATI準拠のバリ取りブレード(CDB)

- 産業用途
ATIインダストリアルオートメーションの準拠したバリ取りブレードは、さまざまな材料のエッジバリ取り、面取り、皿穴加工、削り取り、バリ取りなどの操作を行うモーターレスのバリ取りツールです。
El.En(エレン)社
封じ切り型RF励起CO2レーザー RF303 / RF404 / RF505 / RF606(300~600W)

- 加工用途
- 理化学用途
- 産業用途
イタリア El.En.(エレン社)の封じ切り型RF励起CO2レーザー(炭酸ガスレーザー)です。
同じくイタリアにあるOT-LAS社のレーザー加工機の光源としても利用されており、産業用途で実績のあるガスレーザーです。
出力によって、300~600Wまでの4種類あります(RF303 / RF404 / RF505 / RF606)。
-
- 波長
- 10.6 μm / 10.2μm / 9.3 μm
-
- 出力
- 300~600W
セルフリフィリング 高出力CO2レーザー RF333 / RF555 / RF777 / RF888 / RF899(320~850W)

- 加工用途
- 理化学用途
- 産業用途
イタリア El.En.(エレン)社のCO2レーザー(炭酸ガスレーザー)は、定期的に自動ガス補充が行われるため、常に安定したビーム品質およびレーザー出力が得られます。
同じくイタリアにあるOT-LAS社のレーザー加工機(切断,マーキング,彫刻,クリーニングなど)の光源としても利用されており、産業用途で実績のあるガスレーザーです。
出力によって、320~850Wまでの5種類あります(RF333 / RF555 / RF777 / RF888 / RF899)。
-
- 波長
- 10.6 μm / 10.2 μm
-
- 出力
- 320~850W
セルフリフィリング 大出力CO2レーザー RF1222 / RF1555(1.2kW/ 1.5kW)

- 加工用途
- 理化学用途
- 産業用途
イタリア El.En.(エレン)社のCO2レーザー(炭酸ガスレーザー)は、定期的に自動ガス補充が行われるため、常に安定したビーム品質およびレーザー出力が得られます。
RF1222/RF1555は、特に高出力・高ピークパワーを有し、ダイボードカットや皮革切断,大理石への彫刻,高速切断などに利用されています。
-
- 波長
- 10.6µm
-
- 出力
- 1200W / 1500W
超小型4軸水平多関節ロボット(スカラロボット)
メカデミック社(MECADEMIC)超小型スカラロボット MCS500

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
メカデミック社のMCS500は、超小型・超高繰り返し位置精度を有する4軸水平多関節ロボット(スカラロボット)です。
コントローラが本体に内蔵されており、小型スカラロボットの中でも特にコンパクトなため、ピックアンドプレースなど各種作業で利用している従来のロボットとの置き換えもスムーズに行えます。
Bodor laser社
空冷式ハンディレーザー溶接機 Bodor Welder Air1200

- 加工用途
- 産業用途
チラーを使用しない、レーザー出力最大1,200WのBodor(ボーダー)ハンディファイバーレーザー溶接機が登場しました。
さび取りができる機能がついており、重量も40kgと軽量で持ち運びも可能です。
-
- 波長
- 1080nm
-
- 出力
- 1.2kW
自己冷却ハンディレーザー溶接機 Bodor Welder 1500 Pro

- 加工用途
- 産業用途
チラーを必要としない、Bodor(ボーダー)ハンディファイバーレーザー溶接機の登場です。独自の自己冷却機能を搭載しており、このコンパクトさは従来のハンディレーザー溶接機にはありません。
-
- 波長
- 1080nm
-
- 出力
- 1.5kW
フェムト秒レーザー
EKSPLA社 産業用フェムト秒レーザー FemtoLux 3

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
マイクロジュール級フェムト秒産業用レーザー
FemtoLux 3 は、研究開発用途および産業用途への組み込みの両方を目的として設計された最新のフェムト秒ファイバーレーザーです。
透明材料のマーキングや体積加工、フォトポリメリゼーション、生体イメージング、非線形顕微鏡など、さまざまな用途に応じてレーザー条件を最適化することが可能です。
EKSPLA社 産業用フェムト秒レーザー FemtoLux 30/50/HE

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
FemtoLux は、最高レベルの信頼性、シームレスな装置組み込み、そして革新的なドライ冷却方式による 24時間365日・メンテナンスフリー連続運転の実現を前提に開発された高出力フェムト秒レーザーです。豊富なオプションによりこの超短パルスレーザーを目的とする材料加工タスクに最適化することが可能です。その優れた性能により2024年国際会議SPIEにてPrizm Awardを受賞しました。
MPB Communications社 フェムト秒ファイバーレーザー

- 加工用途
- 医療用途
- 微細用途
- 理化学用途
- 産業用途
MPB Communicationsの高出力モードロックフェムトファイバレーザーは、920nm又は1190nmで発振する2機種がございます。小型でメンテナンスフリーのファイバーベースであり、非常に良好なビームプロファイルを有します。
-
- 波長
- 920nm・1190nm
-
- 出力
- 1W
MPB Communications社 フェムト秒ファイバーレーザー (シード光源に最適)

- 加工用途
- 医療用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
長年にわたる通信分野による経験を活かした極めて信頼性の高いフェムト秒ファイバーレーザーです。
信頼性のあるSESAMを用いておりますが、SESAMを使用しない"All-Fiber-Mode-Lock"のフェムト秒ファイバーレーザーもございます。シード光源に最適で、世界的に多くの実績がございます
-
- 波長
- 1020-1100nm
-
- 出力
- Seed光のみ:2-10mW, 前置増幅:150mW, 主増幅:3W
HÜBNER Photonics社 フェムト秒超短パルスファイバーレーザー VALO

- 理化学用途
- 産業用途
- 計測用途
VALOシリーズは小型でターンキーによる発振が可能であり、<50fsのパルス幅による高いピークパワーを得ることができます。PCによる事前の群速度分散補償により、集光点で最も高いピークパワーを得ることができるように制御することができます。
-
- 波長
- 1045nm
Montfort Laser社 高出力LD励起フェムト秒レーザー

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
Yb系レーザー結晶をを用いたフェムト秒レーザーです。LD励起のため、従来のグリーンレーザーを用いた励起方式よりも小型で高い信頼性をもっております。
-
- 波長
- 1045nm
-
- 出力
- 50W, 75W, 100W
Montfort Laser社 LD励起フェムト秒レーザー
- 医療用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
Yb系レーザー結晶をを用いたフェムト秒レーザーです。LD励起のため、従来のグリーンレーザーを用いた励起方式よりも小型で高い信頼性をもっております。
-
- 波長
- 1045nm
-
- 出力
- 1.5W, 3W
ファイバークリスト社(Fibercryst)高出力フェムト秒レーザー
- 加工用途
- 微細用途
- 産業用途
高いダメージ閾値を持つ単結晶ファイバーをレーザー媒質に用いることで最大200Wのフェムト秒パルスを得られるレーザー発振器です。PSO(位置同期出力)による高速レーザー加工が可能で、SHG、THGオプションもございます。
-
- 波長
- 1030nm
-
- 出力
- 30W, 50W, 80W, 100W, 200W
Huaray社 超小型 産業用フェムト秒レーザー HR-FemtoA

- 医療用途
- 理化学用途
- 産業用途
産業用ファイバーフェムト秒レーザー HR-FemtoA は、独自の空冷式放熱モジュールを搭載した、高安定・高信頼性を有した、超小型の超短パルスレーザーです。
産業用としてはもちろんのこと、バイオフォトニクスや光医療といった研究分野にも適しています。
-
- 波長
- 1035nm
-
- 出力
- 10W
ナノ秒パルスレーザー
LD励起高パルスエネルギー1064nmレーザー

- 加工用途
- 理化学用途
- 産業用途
- 計測用途
コントローラーと発振器が一体型の超小型 100mJクラスのNd:YAGレーザーです。LD励起のため信頼性が高く、小型化、高平均出力及び低ジッターをもたらします。
-
- 波長
- 1064 nm
-
- 出力
- 1 W〜4 W
LD励起高パルスエネルギー532nmレーザー

- 理化学用途
- 産業用途
- 計測用途
コントローラと発振器が一体型の超小型 50mJクラスのNd:YAG結晶を用いた532nmレーザーです。LD励起のため高い変換効率、小型化、高平均出力及び低ジッターをもたらします。
-
- 波長
- 532nm
-
- 出力
- 5W
PIV用ディュアル532nmレーザー

- 理化学用途
- 産業用途
- 計測用途
発振器とコントローラーが一体型のわずか4 kg以下のの小型PIV用ディュアルレーザーです。一つの筺体から異なる2つのパルスを遅延して発振することができます。
-
- 波長
- 532nm
-
- 出力
- 1.5W
ファイバーバンドル出射LD励起高エネルギーパルス1064nmレーザー

- 理化学用途
- 産業用途
- 計測用途
高エネルギーパルスレーザーにファイバーバンドルを付属することで、接地面積に限りがある場所での計測を可能にします。
-
- 波長
- 1064nm
-
- 出力
- 1~4W
LD励起波長可変OPOレーザー (光音響に最適)

- 理化学用途
- 産業用途
- 計測用途
Montfort Laser社の優れた小型LD励起パルスレーザーを用いて、発振器とコントローラの一体型をもたらした660nm~1300nmで波長可変な空冷式のOPO(optical parametric oscillator)レーザーです。重さも約16kgと従来のOPO光源と比べてかなり軽量です。
-
- 波長
- 660nm~1300nm
-
- 出力
- 0.4W
MPB Communications社 775nmパルスレーザー(最大40MHz)

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
775nmのナノ秒モード同期ファイバーレーザーで、40MHzまでの高い繰り返しで30nJのパルスエネルギーを出力することができます。ファイバーベースのため高い信頼性を持っております。
-
- 波長
- 775nm
-
- 出力
- 1.2W
MPB Communications社 532nmパルスレーザー(最大40MHz)

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
532nmのナノ秒モード同期ファイバーレーザーで、40MHzまでの高い繰り返しで30nJのパルスエネルギーを出力することができます。ファイバーベースのため高い信頼性を持っております。
-
- 波長
- 532nm
-
- 出力
- 1.2W
MPB Communications社 560nmパルスレーザー(最大40MHz)

- 医療用途
- 理化学用途
- 産業用途
- 計測用途
560nmのナノ秒モード同期ファイバーレーザーで、40MHzまでの高い繰り返しで30nJのパルスエネルギーを出力することができます。ファイバーベースのため高い信頼性を持っております。
-
- 波長
- 560nm
-
- 出力
- 1.2W
Huaray社 完全空冷ナノ秒パルス UVレーザー5W

- 加工用途
- 微細用途
- 産業用途
ハーレイプレシジョンレーザ社は中国有数の固体レーザーメーカーです。同社の固体レーザーはISO9001品質マネジメントによる精密な管理、CLASS 1000のクリーンルーム環境下で製作されています。低価格でありながら、高出力、高ビーム品質、高信頼性を誇ります。
-
- 波長
- 355nm
-
- 出力
- 5W
Huaray社 完全空冷ナノ秒パルス グリーンレーザー

- 加工用途
- 微細用途
- 産業用途
ハーレイプレシジョンレーザー社は中国有数の固体レーザーメーカーです。同社の固体レーザーはISO9001品質マネジメントによる精密な管理、CLASS 1000のクリーンルーム環境下で製作されています。低価格でありながら、高出力、高ビーム品質、高信頼性を誇ります。
-
- 波長
- 532 nm
-
- 出力
- 25 W,35 W
ブライトソリューションズ社(Bright Solutions) DPSSレーザー Onda(オンダ)

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
完全空冷・パルス幅nsのLD励起Q-SWレーザーです。
-
- 波長
- 1064nm, 532nm, 355nm, 266nm
ブライトソリューションズ社(Bright Solutions) DPSSレーザー Sol(ソル)

- 加工用途
- 微細用途
- 産業用途
パルス幅 ns のレーザー光を発振させることができる小型・空冷のレーザー装置です。
-
- 波長
- 1064nm, 532nm,355nm
ブライトソリューションズ社(Bright Solutions) DPSSレーザー Wedge(ウエッジ)

- 加工用途
- 微細用途
- 産業用途
サブナノ秒のパルス幅のレーザー光を発振可能な小型・空冷タイプのレーザー装置です。
-
- 波長
- 1064nm, 532nm, 355nm, 266nm
パンテック社(Pantec Engineering) 高出力Mid-IRレーザー

- 医療用途
- 微細用途
- 理化学用途
- 産業用途
3μmは水の最適な吸収波長の為、3mikronレーザーは、生体組織の分野で驚くべき成果を上げています。
ポリカーボネート・アクリル等、3μmの波長を吸収する材質であれば、従来の機械的な切断・穴あけ・研削等の加工は、3mikronレーザーへの置き換えで一層の効率アップが期待できます。半導体励起3mikronレーザーシステムは、これまでのフラッシュランプ励起方式より安全でコンパクトなため、レーザー装置の新しい応用を可能にします。
-
- 波長
- 3μm
-
- 出力
- 2W/5W
ハイパースペクトルイメージセンサー
スナップショットモザイク型ハイパースペクトルイメージングセンサー(460~630nm)
- 産業用途
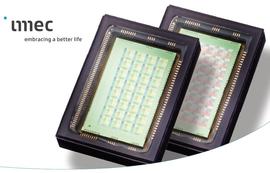
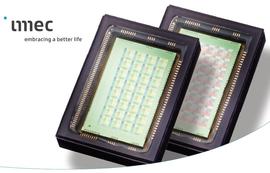
Imecのスナップショットモザイク型ハイパースペクトルイメージングセンサーは、16又は25の異なるスペクトルフィルターを1画素ごとに施すことで、対象物又はセンサーの走査をすることなしに、ハイパースペクトル画像を構築します。また、すぐに使用できるフォーマットでパッケージ化されています。
スナップショットモザイク型ハイパースペクトルイメージングセンサー(600~1000nm)
- 産業用途
Imecのスナップショットモザイク型ハイパースペクトルイメージングセンサーは、16又は25の異なるスペクトルフィルターを1画素ごとに施すことで、対象物又はセンサーの走査をすることなしに、ハイパースペクトル画像を構築します。また、すぐに使用できるフォーマットでパッケージ化されています。
スナップショットタイル型ハイパースペクトルイメージングセンサー(600~1000nm)
- 産業用途
Imecのスナップショットタイル型ハイパースペクトルイメージングセンサーは、32種類の異なるスペクトルフィルターを施すことで、対象物又はセンサーの走査をすることなしに、ハイパースペクトル画像を構築します。
ラインスキャン用ハイパースペクトルイメージングセンサー(470~900nm)
- 産業用途
Imecのラインスキャン用ハイパースペクトルイメージングセンサーは、CMOSセンサー上の縦軸方向にリニアバリアブルフィルターが施され、対象物又はセンサーを走査させることでハイパースペクトル画像を取得することができます。
ラインスキャン用ハイパースペクトルイメージングセンサー(600~1000nm)
- 産業用途
Imecのラインスキャン用ハイパースペクトルイメージングセンサーは、CMOSセンサー上の縦軸方向にリニアバリアブルフィルターが施され、対象物又はセンサーを走査させることでハイパースペクトル画像を取得することができます。
Five Laser Technology社
ハンドヘルドファイバー溶接機

- 加工用途
- 産業用途
より速く、より高い溶接性能、より低い適用コスト。
搭載のデュアルスキャニングモーター溶接ヘッドは、より多くのレーザースポットモードで溶接できます。
シングルモードヘッドに比べ、シームは強固で美しい仕上がりです。
-
- 波長
- 1080
-
- 出力
- 1.0kW/1.5kW/2.0kW
Cobolt 狭帯域半導体レーザー 08シリーズ
405nm/488nm 狭帯域半導体レーザー 08-NLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
405nm/488nm 半導体レーザーと狭帯域化光学素子により、<20 pmのスペクトル幅を実現しました。ラマン分光等のアプリケーションに有力です。
-
- 波長
- 405nm、488nm
-
- 出力
- 40 mW
633nm 狭帯域半導体レーザー 08-NLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
633nm半導体レーザーと狭帯域化光学素子により、<1 pmのスペクトル幅を実現しました。ラマン分光や干渉計等のアプリケーションに有力です。
より狭線幅のレーザーをお求めのときはこちらをご覧ください。
638nm 狭帯域半導体レーザー 08-NLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
638nm半導体レーザーと狭帯域化光学素子により、<1 pmのスペクトル幅を実現しました。ラマン分光や干渉計等のアプリケーションに有力です。
785nm 狭帯域半導体レーザー 08-NLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
785nm半導体レーザと狭帯域化光学素子により、<1pmのスペクトル幅を実現しました。ラマン分光等のアプリケーションに有力です。
CoboltレーザーはHTCUREテクノロジー(筐体内光学部品硬化・固定技術)により堅牢な接着、機械収縮を低減し耐衝撃性及び耐湿性に優れ、極めて高い信頼性を誇っております。
狭帯域785nm, 500mW固体レーザー (<500kHz) Discoはこちらをご覧ください。
830nm 狭帯域半導体レーザー 08-NLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
830nm半導体レーザと狭帯域化光学素子により、狭帯域のスペクトル幅を実現しました。ラマン分光等のアプリケーションに有力です。
紫外線ゼロ クリーンルーム専用LED蛍光灯
紫外線ゼロ クリーンルーム専用LED蛍光灯
- 産業用途
新たに開発した蛍光剤をLEDに用いる事により紫外線の放射が無く、さらにポリカーボネイトの樹脂に紫外線を遮断する特殊な材料を含有
させて紫外線の放射を完全に無くしました。
ユニバーサルロボット用アクセサリ
ロボテック社ROBOTIQ ユニバーサルロボット用 フォース・トルクセンサー

- 産業用途
高品質デジタルシグナル 簡便なインストールによるユニバーサルロボット用6軸フォーストルクセンサーです。
ナベル社 UR専用ロボットカバー

- 産業用途
Robot-Flexは、 URロボットアームをさまざまな環境から保護するカバーです。
ナベル独自の加工技術と最新の3Dテクノロジーを活用して開発されたRobot-Flexは、
ロボットを隙間なく覆う一体式(2種類)と、
ロボットにフィットし追従する分割式(4種類)がラインナップされています。
着脱が容易で、 使用環境に合わせて選べるよう、 6種類の素材が用意されています。
Beijer Electronics社 HMIパネルX2シリーズ

- 産業用途
HMIパネルX2 シリーズは、Beijer Electronics社の強力な HMI パネル製品群です。異なる機械と設備から製造現場のデータを収集・統合し、多彩で美しいグラフ等を表示できます。
また、IIOTゲートウェイや産業用PCを使用せずに、収集・統合したデータを様々なプロトコルで上位ERP等にアップロードできます。
OnRobot社 ユニバーサルロボット用HEX6軸力/トルクセンサー

- 産業用途
OnRobot社のHEX 6軸力/トルクセンサーは、6度の力とトルクの測定を提供します。 これにより、HEX 6軸力/トルクセンサーは、複雑な研磨、バリ取り、または組み立て作業に最適です。アームの先端のツーリングに加えられる力を正確に制御できるためです。このセンサーは、表面仕上げ作業に特に理想的です。これは、仕上げ全体を通して一定の速度と力が維持されることを保証するためです。一定の力により、仕上げツールはワークピースの表面の輪郭に追従し、完璧な結果をもたらします。
OnRobot社 ユニバーサルロボット用クイック OnRobot チェンジャー

- 産業用途
クイック OnRobot チェンジャーは革新的なツールチェンジャーであり、市場最小かつ最軽量です。
使いやすいロックメカニズム、追加の安全ロック構造、ロックスプリングを備えた信頼性の高い特許を取得したクイック OnRobot チェンジャーは、すべての恊働ロボットアプリケーションに最適なユニークな製品です。
これは、ロボットにあらゆるアームの先端工具を適合させ、オペレーターがわずか数秒でアームの先端工具(EoAT)を変更できる世界で最も簡単で最速のツールチェンジャーです。
デュアル クイック OnRobot チェンジャーは、通常のクイック OnRobot チェンジャーと同じ柔軟性と迅速なツール交換を提供します。今では、ロボットに2つのエンドオブツール(EoAT)アタッチメントを同時に装備できます。ロボットアームに2つのエンドエフェクタを装備すると、1つのサイクルで2つのツールを使用できるようになり、生産性が50%以上向上します。
コスメック社ユニバーサルロボット用ロボットハンドチェンジャー

- 産業用途
コスメック社の位置再現精度0.003mmの高精度・高剛性ツールチェンジャーでユニバーサルロボットに装着することで更に作業の幅が拡がります。
連結時のガタツキゼロで高精度(位置再現精度:3μm)・高剛性(曲げ、ねじりに強い)・高寿命(100万回以上の耐久性)
[NEW] 樹脂コネクタ電極オプションを追加ラインナップ
EasyRobotics社 UR3/UR5専用モバイルステーションER5

- 産業用途
作業の現場で UR3、UR5を人が牽引して自由に移動できるモバイルステーションです。
ロボワールドモルデッドプロダクツ社 URペンダント専用衝撃吸収フレーム

- 産業用途
Pendant Armor®は1.5mの高さから落下しても URティーチングペンダントをしっかり守ります。
レーザー切断機
厚板ガラスのレーザー切断と分断装置

- 加工用途
- 産業用途
従来不可能であった、数cm単位の厚板ガラスをレーザーを用いた特殊加工により、精密、しかも安価に切断出来る技術が可能になりました。
製造メーカ:Physical Photon株式会社
光ファイバー
産業用マルチモード光ファイバ

- 加工用途
- 理化学用途
- 産業用途
- 計測用途
CeramOptec社は35年以上の実績を有する産業用マルチモード石英光ファイバーメーカーです。プリフォームから自社内で製造しており、多種多様なファイバー素線及び各種加工品(バンドル・ケーブル)を少量からでもご提供可能です。
OT-LAS オトラス社
BX(レーザー切断機&レーザーマーカー)

- 加工用途
- 産業用途
El.En.社のCO2レーザーを用いたレーザー加工機で、レーザー切断やレーザーマーキングが可能です。
レザー(皮革),インソール,プラスチック,アクリル,グラナイト(花崗岩),マーブル(大理石)などを切断できます。
最小マーキング線幅は、0.2~0.6 mmです。
BX Multiaxes(3Dレーザーマーカー/表面装飾加工機)

- 加工用途
- 産業用途
El.En.社のCO2レーザーを用いて、2D図面を複雑な3次元表面に調整し加工できるレーザー加工機です。
ポリエステル,マイクロファイバー,シルク,ジーンズ,コットン,ビスコース繊維などに加工可能です。
CX(レーザー切断機&レーザーマーカー/表面装飾加工機)

- 加工用途
- 産業用途
El.En.社のCO2レーザーを用いたレーザー加工機で、皮革や布,木材,ベニヤ,紙,ガラス,プラスチック,セラミック,大理石などの切断やマーキング/装飾加工が可能です。
最大出力850WのCO2レーザーを使用し、最大1200×1200 mmの加工エリアを有します。
CX Micro-perforation(レーザー微細穴あけ装置/マイクロパーフォレーション)

- 加工用途
- 産業用途
El.En.社のCO2レーザーを用いて、プラスチックや木材に微細な穴を開けることができるレーザー加工機です。
MX(ロールtoロールレーザー加工機)

- 加工用途
- 産業用途
El.En.社のCO2レーザーを用いて、ポリエステル,マイクロファイバー,シルク,ジーンズ,コットン,ビスコース繊維など様々な種類の布地をロールtoロールで連続的に加工することができるレーザー加工機です。
GTL(レーザー加工ユニット)

- 加工用途
- 産業用途
El.En.社のRF177(平均出力180W,ピーク出力450W)を搭載したレーザー加工機です。
生産ラインですぐ使えるように、電源,コントローラ,集光光学系が装備されています。
ポリエステル,マイクロファイバー,シルク,ジーンズ,コットン,ビスコース繊維などの切断やトリミングが可能です。
RX(レーザー加工ロボット)

- 加工用途
- 産業用途
ElEn社のCO2レーザー装置から出射されたレーザー光を、ロボットアームの先端まで効率よく送り、3Dレーザー切断を可能にした装置です。
先端にスキャニングヘッド(走査範囲180×180 mm~500×500 mm)を取り付けることもできます。
Cobolt 半導体レーザー 06シリーズ
415nm 半導体レーザー 06-MLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
Coboltの415nmレーザーは優れたビーム整形技術により、ビーム品質が高い製品となっております。また、半導体レーザーの特長を活かし、最大150MHzの強度変調が可能です。
-
- 波長
- 415nm
-
- 出力
- 120mW
425nm 半導体レーザー 06-MLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
Coboltの425nmレーザーは優れたビーム整形技術により、ビーム品質が高い製品となっております。また、半導体レーザーの特長を活かし、最大150MHzの強度変調が可能です。
-
- 波長
- 425nm
-
- 出力
- 120mW
445nm 半導体レーザー 06-MLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
Coboltの445nmレーザーは優れたビーム整形技術により、ビーム品質が高い製品となっております。また、半導体レーザーの特長を活かし、最大150MHzの強度変調が可能です。
-
- 波長
- 445nm
-
- 出力
- 120mW
505nm 半導体レーザー 06-MLD コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
Coboltの505nmレーザーは優れたビーム整形技術により、ビーム品質が高い製品となっております。また、半導体レーザーの特長を活かし、最大150MHzの強度変調が可能です。
-
- 波長
- 505nm
-
- 出力
- 80mW
ユニバーサルロボット用アプリケーションキット
EasyRobotics社 ユニバーサルロボット専用ロボットオートメーションProfeeder

- 産業用途
ProFeederモジュールシステムは、ProFeeder Table、ProFeeder Light、ProFeeder、ProFeederの4段階から選べるロボットオートメーションシステムです。
ABCOR BINZEL社UR用ロボット溶接装置ROBIPAK
- 加工用途
- 産業用途
ABCOR BINZEL(ビンツェル社)のROBIPAKは電源からアセンブリ材料、溶接トーチまでの当社の完全な機器パッケージですからユニバーサルロボットをお持ちDEあればすぐにロボット溶接が始められます。
ロボテック社ROBOTIQ ユニバーサルロボット用ROBOTIQ仕上げキット

- 産業用途
Robotiq仕上げキットは、コボット用の唯一のハードウェアおよびソフトウェアオールインワンソリューションです。仕上げ作業を手に持って行う作業でも、テーブルに固定する作業でも、Robotiqが対応します。
すべてのキットには、ロボット工学の専門知識がなくても仕上げアプリケーションを自動化したい人にプログラミングの時間を節約するために作られた、受賞歴のある仕上げコパイロットソフトウェアが含まれています。
ダイヘン社ロボット溶接システムWelbee Co-R

- 産業用途
ダイヘンの”Welbee Co-R(ウェルビー コアール)”は協働ロボットによる高品質な溶接を実現するアプリケーションキットです。使い勝手の良いトーチマウントと複雑さを排した溶接設定画面、高能率で高品質な溶接を実現するWelbee溶接機が、溶接現場の自動化を強力に支援します。溶接のプロフェッショナルであるダイヘンのノウハウが詰まったWelbee Co-Rは、人手不足に悩む溶接現場の新たな解決策です。
ロボテック社ROBOTIQ ユニバーサルロボット用ROBOTIQビンピッキングキット

- 産業用途
自動化の民主化という当社のコアバリューに沿って、Bin Picking Kitは、部品の配置、ピッキング、取り扱い、および配置のための明確なパスを設定します。それは素晴らしい製品の組み合わせだけでなく、私たちがあなたに提供する幅広い知識についてもです。«Robotiqtouch»でビンピッキングを試してください。
CW LD励起固体レーザー(シングル縦モードなど)
488nm LD励起固体レーザー 08-DPL コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
最大出力100mWの08-DPLシリーズ新製品です(2025.10)。
-
- 波長
- 488 nm
-
- 出力
- 100 mW
640nm LD励起固体レーザー Rogue コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
TEM00モードの縦多モードCWレーザーです。
Rogue-iEは、制御機器がレーザー筐体内に組み込まれており、外部コントローラーが不要なモデルです。
-
- 波長
- 640nm
-
- 出力
- max.1W
532nm, 553nm, 561nm, 594nm レーザー高速変調タイプ 06-DPL コボルト(Cobolt)

- 理化学用途
- 産業用途
- 計測用途
一般的に固体レーザーは直接の高速変調が困難でしたが、Cobolt社製の532nm, 553nm, 561nm, 594nmレーザーは最大5kH~50kHzのアナログ・デジタル変調を行うことができる製品となっております。
CoboltレーザーはHTCUREテクノロジー(筐体内光学部品硬化・固定技術)により堅牢な接着、機械収縮を低減し耐衝撃性及び耐湿性に優れ、極めて高い信頼性を誇っております。
-
- 波長
- 532nm, 553nm, 561nm, 594nm
-
- 出力
- 25mW~200mW
ナノ秒パルス LD励起固体レーザー Tor
355nm パルスレーザー Tor コボルト(Cobolt)

- 加工用途
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
Cobolt Tor(トール)シリーズは、小型で高性能なUVパルスレーザーです。パルスエネルギー18μJ、<5nsのパルス幅、>7kHzの高繰り返しパルスを安定して出力することができます。
-
- 波長
- 355nm
-
- 出力
- 18μJ
532nm 小型パルスレーザー Tor コボルト(Cobolt)
- 加工用途
- 医療用途
- 理化学用途
- 産業用途
- 計測用途
Cobolt Tor(トール)シリーズは、独自のHTCure技術による小型な超堅牢な密閉パケージの高性能なグリーンパルスレーザーです。パルスエネルギー60uJ、<5nsのパルス幅、>7kHzの高繰り返しの単一横モードパルスを安定して出力することができます。
※561nmパルスレーザーも製作可能です。
-
- 波長
- 532nm
-
- 出力
- 60uJ
532nm 小型パルスレーザー Tor XS コボルト(Cobolt)

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
CoboltのQスイッチパルスレーザーTor XSは超小型でありながら、>50uJのパルスエネルギーで1kHzまでの繰返し周波数で発振することが可能です。
-
- 波長
- 532nm
-
- 出力
- 50uJ
532nm 小型パルスレーザー Tor XE コボルト(Cobolt)

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
コボルト(Cobolt) 小型532nmパルスレーザー Tor XEシリーズは、小型でありがなら最大250uJのパルスエネルギーを出力することができます。LIBSや光音響にも適しています。
-
- 波長
- 532nm
-
- 出力
- 250μJ
1064nm 小型パルスレーザー Tor コボルト(Cobolt)

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
Cobolt Torは、小型で高性能なQスイッチレーザーです。パルスエネルギー160μJ、<5nsのパルス幅、>7kHzの高繰り返しパルスを安定して出力することができます。500μJのパルスエネルギーを発振することができるTor XEもございます。
-
- 波長
- 1064nm
-
- 出力
- 160uJ
1064nm 超小型パルスレーザー Tor XS コボルト(Cobolt)

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
CoboltのQスイッチパルスレーザーTor XSは超小型でありながら、最大パルスエネルギー100μJが得られ、1kHzまでの繰返し周波数で発振することが可能です。
-
- 波長
- 1064nm
-
- 出力
- 100uJ
1064nmパルスレーザー Tor XE コボルト(Cobolt)

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
コボルト(Cobolt) 小型1064nmパルスレーザー Tor XEシリーズは、小型でありがなら最大500uJのパルスエネルギーを出力することができます。LIBSや光音響に適しています。
-
- 波長
- 1064nm
-
- 出力
- 500uJ
ユニバーサルロボット用オフラインシュミレーションソフトウェア
ARTIMINDS RPS ユニバーサルロボット専用モーションプログラミング
- 産業用途
ユニバーサルロボットとフォーストルクセンサー装着時の最も過酷な自動化課題:タイトフィット許容差、プラスチック部品実装、タイトな包装、ケーブル配線、電子機器組立や研磨などの作業に容易にプログラミングできます。
ユニバーサルロボット用アクセサリ(その他)
カンタム社日本製ユニバーサルロボット用撥水ジャケット

- 産業用途
伸縮性に優れた素材で ロボットへの撥水と汚れ等の付着を防ぎます。
カンタム社ユニバーサルロボット用フィルムスイッチ

- 産業用途
弊社と伊藤忠マシンテクノス等共同開発・特許出願中の独自タッチセンサー(フィルムスイッチ)で安全性が向上します。
わずかに触れるだけ(5N以下)でロボットは停止。ユニバーサルロボットは通常で150N以下で停止する安全設計に
配慮した柵なしロボットですが協働作業をする人に対する更なる安全性を確保します。
八十島プロシード社YASOJIMA 3Dプリンター製 軽量ロボットグリッパー

- 産業用途
3Dプリンター製だからワークの形状が変わっても設計変更が容易です。ユニバーサルロボット用カスタマイズ受注で承ります。
ハーモテック社ユニバーサルロボット用KUMADE Fork

- 産業用途
ハーモテック社のKUMADEとは高速の旋回流を発生させ旋回流中心部の 負圧によりワーク物を保持するという新しい概念から生まれた技術です。
オプティクス
S&R Optic社製 高品質波長板・偏光子
- 医療用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
S&R Optic GmbHは高品質な波長板・偏光板等の製作が可能な光学メーカーです。特にマイカ(雲母)の高品質化に成功し、低価格でリタデーションの小さい波長版の作製が可能になりました。シングルプレートでも作製できるため、極めて高いダメージ閾値(58J/cm2, 11ns, 100Hz@1064nm)を持ち、かつ温度及び入射角依存性が小さい波長板に仕上がっております。また、シングルプレートでありながら波長400-700nm又は700-1100nmの広帯域で価格は25,000円~と非常にCPの高い波長板です。さらにマイカは水晶よりも長い透過域(6000nm)を持つため、さらなる応用の可能性を持っております。
アルテクナ社 Altechna
- 理化学用途
- 産業用途
- 計測用途
リトアニア共和国のAltechna社は高性能なレーザー用光学素子を提供します。例えばイオンビームスパッタリングにより成膜された超低損失ミラーはローコストでありながら、最大99.995%の反射率を誇ります。その他各種オプティクスもこの製膜技術を生かし、先端的な研究開発に貢献しております。
アルテクナ社(Altechna) 高耐力ミラー

- 産業用途
イオンビームスパッタリング又は電子ビーム蒸着を利用した高反射・高耐力ミラーです。
波長は266nm~1550nmの間で入射角0°及び45°を取り揃えております。
また、1ヵ月に1000個の生産能力を持ち、0.19um ~20umの範囲で特注対応が可能です。
アルテクナ社 (Altechna) レーザーアッテネーター

- 産業用途
Atechnaのアッテネーターは高い耐力を持つλ/2波長板とPBSを用いることで、連続可変が可能な出力調整を行うことができます。シンフィルムポラライザーを用いることでフェムト秒レーザーにも対応可能です。
アルテクナ社(Altechna) 波長板

- 産業用途
Atechnaの波長板は品質に対するコストパフォーマンスが非常に高く、単一波長板、大口径波長板、広帯域波長板、高耐力波長板、2波長波長板及び中赤外波長板がございます。
アルテクナ社(Altechna) ラジアルビーム変換素子

- 微細用途
- 産業用途
S波長板は、入射直線偏光をラジアル偏光やアジマス偏光に変換する特殊な構造の波長板です。S波長板は、入射円偏光を、角運動量を持つ光に変換するのにも使うことができます。損傷閾値が高いのが特徴で、液晶素子の少なくとも100倍以上高い値を示します。S波長板は、UVFSバルク内に形成されます。
アルテクナ社(Altechna) 薄型ポラライザー

- 加工用途
- 微細用途
- 理化学用途
- 産業用途
- 計測用途
Altechnaの薄膜ポラライザーは、高エネルギーアプリケーションに最適です。
グランテーラーレーザ偏光プリズムや偏光キューブビームスプリッタに置き換えて使うことができます。
通常BK7又はUVFSの誘電体コート付きブリュースタ薄膜ポラライザーは、高エネルギーレーザー光のs偏光成分とp偏光成分を分岐する光学素子で、共振器の内部もしくは外部で使用することができます。消光比Tp/Tsは最大で1000:1となっております。フェムト秒レーザーに適した広帯域薄膜ポラライザーもご用意しております。
アルテクナ社(Altechna) PBS

- 微細用途
- 理化学用途
- 産業用途
- 計測用途
偏光キューブは、特定波長(250~2200 nm)で最適化された4つの入出射面にARコートが施されています。キューブ型偏光ビームスプリッタは、ランダム偏光の光を2つの直交する直線偏光に分けることができます(s偏光は90°方向に反射、p偏光は透過)。ビームスプリッタは、一組の高精度直角プリズムを接合したもので、一方のプリズムの斜面に誘電体コートが施されています。Altechnaでは標準クラスのPBSと高エネルギーパルスレーザー向けPBSをご用意しております。
アルテクナ社 (Altechna) ビームエクスパンダー

- 産業用途
Atechnaのビームエクスパンダーはレーザー耐力が高く、波面収差が低く抑えられているため、微細加工の用途に適しています。
薄膜光学素子ペリクル

- 微細用途
- 理化学用途
- 産業用途
- 計測用途
ナショナルフォトカラー社の薄膜光学素子ペリクルは、膜厚が数μmのため二次反射や球面収差,色収差,屈折異常のない光学素子として、超薄形のビームスプリッタやウィンドウ、ミラー、フィルタとして主に分光装置などで利用されております。
高出力アンプ
ファイバクリスト社(Fibercryst)単結晶ファイバー増幅器 Nd:YAG

- 微細用途
- 理化学用途
- 産業用途
Fibercryst社の単結晶ファイバー育成技術と放熱技術により、優れたレーザー増幅を可能にします。バルク結晶と比べて励起光が導波しますので、効率の良い励起をもたらします。(シード光は全反射せずに透過)
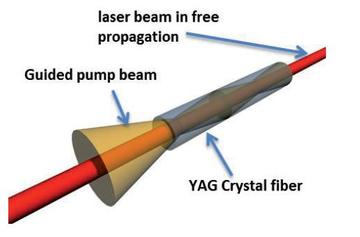
また、従来のファイバー増幅ではピークパワーが100kWくらいが限界でしたが、単結晶ファイバーのコア径は約1mmと大きいため、高ピークが必要な際に有用です。ファイバー増幅器の後に、単結晶ファイバーで増幅する方法も効果的です。
-
- 波長
- 1064 nm
ファイバクリスト社(Fibercryst)単結晶ファイバー増幅器 Yb:YAG

- 微細用途
- 理化学用途
- 産業用途
Fibercryst社の単結晶ファイバー育成技術と放熱技術により、優れたレーザー増幅を可能にします。バルク結晶と比べて励起光が導波しますので、効率の良い励起をもたらします。(シード光は全反射せずに透過)
また、従来のファイバー増幅ではピークパワーが100kWくらいが限界でしたが、単結晶ファイバーのコア径は約1mmと大きいため、高ピークが必要な際に有用です。ファイバー増幅器の後に、単結晶ファイバーで増幅する方法も効果的です。
-
- 波長
- 1030 nm