ユニバーサルロボット用アクセサリー
ロボテック社ROBOTIQ ユニバーサルロボット用アディティブグリッパー 3finger
ROBOTIQ

概要
ロボテック社ROBOTIQ アディティブグリッパーはユニバーサルロボットとの組み合わせにより、頑丈で機敏なグリッパーで ロボットに手の機能を 提供します。
用途
- 産業用途
製品特長
- 柔軟性:さまざまなパーツの形状と サイズに対応。
- 強力なコントロール インタフェース:指の位置、速度および力を URのタッチパネルで簡単に設定。
- 優れた耐久性と 信頼性:産業用途設
製品仕様
| 項目/モデル | 3-FINGER |
|---|---|
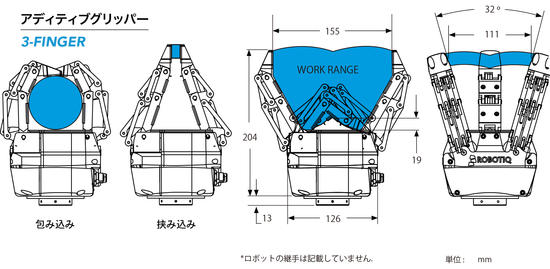
| グリッパー開口部 (図参照) | 0 to 155 mm |
| 重量 | 2.3 kg |
| 包み込み寸法 | 20 to 155 mm |
| 最大荷重(本体を含む) | 10 kg |
|
最大荷重 (フィンガーグリップ) 条件:0.4フィンガーゴムとスチール部品間の摩擦係数、安全係数 | 2.5 kg |
|
グリップ力 (フィンガーグリップ) ±15%,速度と力のパラメータによって異なります | 15 to 60 N |
| 動作速度 (フィンガーグリップ) | 22 to 110 mm/s |
| 動作温度範囲 | -10°C to 50°C |
| 繰り返し精度 (フィンガーグリップ) | 0.05 mm |
●電気仕様
| 電源電圧 | 24 V DC ±10% | |
| 絶対最大電源電圧 | 28 V DC | |
| 静止電力(最小消費電力) | 4.1 W | |
| ピーク電力(最大グリップ力) | 36 W | |
・2 x 5 m シールド付き高フレックスケーブル同梱
●コントロール
| 通信 | Modbus RTU (RS-485, half-duplex) |
| 通信プロトコル・オプション | CANopenModbus TCP, EtherNet/IP, PROFINET, EtherCAT, DeviceNet, |
| プログラミング可能パラメータ | 各指の位置・速度・力制御、横方向フィンガー位置コントロール |
| LED(状態表示) | 電源、通信、およびエラー |
| フィードバック | グリップ検出、把持位置・モータ電流 |
この製品についてのお問合せ・資料請求
製品カタログのご請求、その他、各種お問合せを、こちらのメールフォームにて承っております。
※弊社の個人情報取り扱いについてプライバシーポリシーをご確認の上、お問い合わせください。
入力フォーム読み込み中...フォームが表示されない場合