ヒューマノイドロボット
マルチモーダル二足歩行ロボット TRON 1
LimX Dynamics

概要
TRON 1は、複数のデータや情報をまとめて処理、解析 (Multimodal) をする世界初の二足歩行ロボットになります。
さまざまな分野におけるロボットのハードウェアとソフトウェアの研究開発に活用できます。
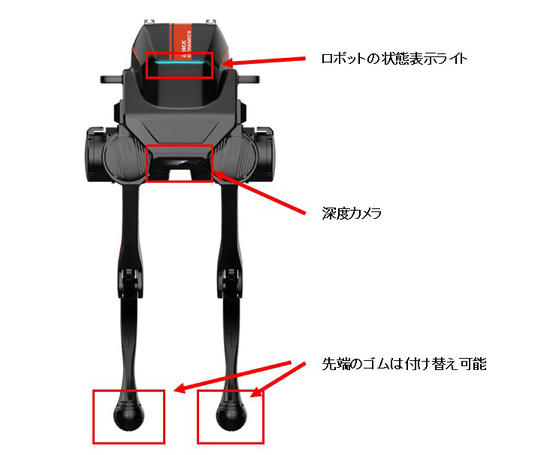
本製品の特徴は、簡単に付け替え可能な3種類の足を用意している点になります。
完全にオープンなSDKと外部接続が可能なインターフェースも備え、ロボットの潜在能力を最大限に引き出し、高度な検証と妥当性の確認 (Verification and Validation: V&V) に対応しております。
C++を必要とせず開発言語にPythonの利用が可能、独自のURDFによりSim2Realでのギャップを最小限に抑えています。
拡張アクセサリとして、アームの取り付け、音声対話、LiDARと深度カメラを使った3Dナビゲーション、障害物回避機能を用意しております。

製品仕様
| 型式 | Tron1 Std. Ed. | Tron2 EDU Ed. |
| 外形寸法・材質・重量 | ||
| 寸法 | <392mm x 420mm x 845mm | <392mm x 420mm x 845mm |
| 材質 | アルミニウム合金 + 工業用プラスチック | アルミニウム合金 + 工業用プラスチック |
| 重量 | < 20kg | <20kg |
| バッテリー仕様 | ||
| 供給電圧 | 48V | 48V |
| 最大出力 | l,000W | l,000W |
| バッテリー入れ替え | 可能 | 可能 |
| バッテリーの種類 | 三元系リチウムイオン電池 | 三元系リチウムイオン電池 |
| 容量 | 240Wh ( 48V/5Ah) | 240Wh ( 48V/5Ah) |
| 動作時間 | > 2h (定格の動作条件にて) | > 2h (定格の動作条件にて) |
| 充電方法 | 充電、もしくは充電済みのバッテリーの入れ替え | 充電、もしくは充電済みのバッテリーの入れ替え |
| 充電器の概要 | 充電用ドッキングステーション | 充電用ドッキングステーション |
| 充電時間 | <1h ( 20%-80%) ; 1.5h ( 100%) | <1h ( 20%-80%) ; 1.5h ( 100%) |
| 性能仕様 | ||
| 許容負荷重量 | 10kg (Maximum 15kg) | 10kg (Maximum 15kg) |
| 動作速度 |
Point-Foot: < 1m/s Sole: < 1m/s wheeled: Maximum speed a 3 m/s |
Point-Foot: < 1m/s Sole: < 1m/s wheeled: Maximum speed a 3 m/s |
| 登坂能力 | 15° | 15 |
| 段差 | 15cm | 15cm |
| コンピューター仕様 |
CPU: 12th Gen Intel i3 メモリー: 16G RAM ストレージ容量: 512G |
CPU: 12th Gen Intel i3 メモリー: 16G RAM ストレージ容量: 512G |
| 動作温度範囲 |
-5°C ~ 40°C (雨天は控えてください) |
-5°C ~ 40°C (雨天は控えてください) |
| アクチュエーター仕様 | ||
| 定格電圧 | 48V | 48V |
| 定格トルク | 30N•m | 30N•m |
| 最大トルク | 80N-m | 80N-m |
| 最大スピード | 15rad/s | l5rad/s |
| センサの構成 | ||
| RGBD Camera | オプション | |
| IMU | 標準 | 標準(IMUデータへのアクセスが可能) |
| 拡張性 | ||
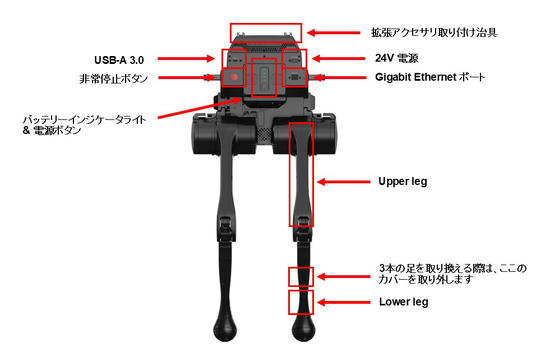
| 拡張ポート |
USB 3.0 x 1 GbE x 1 |
USB 3.0 x 1 GbE x 1 |
| 電源ポート | 24V, 出力 100W (最大 200W) | 24V, 出力 100W (最大 200W) |
| 取り付け治具 | 標準対応 | 標準対応 |
| 遠隔操作 | ||
| 手持ちのリモコン | 標準対応 | 標準対応 |
| リモコン操作での対応可能距離 | 50m | 50m |
| リモコンからの非常停止操作 | 標準対応 | 標準対応 |
| ソフトウェア | ||
| ソフトウェアアップグレード | 標準対応 | 標準対応 |
| ソフトウェアの二次開発 | 標準対応 | |
| 開発ツール | ||
| SDK | 標準 | |
| データ可視化ツール | 標準 | |
| データのレコーディングと再生 | 標準 | |
| 関節制御のアルゴリズム | 標準 | |
| シミュレーションプラットフォーム | 標準 | |
| 足首部分の概要 | ||
|
Point- Foot (動物のような足) |
4方向への移動 旋回 ステップ しゃがみ込み ロボットの高さ調整 地上高の検出 |
4方向への移動 旋回 ステップ しゃがみ込み ロボットの高さ調整 地上高の検出 |
|
Sole (人間のような足) |
4方向への移動 旋回 その場での静止 その場でのしゃがみ込み ロボットの高さ調整 転倒後の立ち上がり 地上高の検出 |
4方向への移動 旋回 その場での静止 その場でのしゃがみ込み ロボットの高さ調整 転倒後の立ち上がり 地上高の検出 |
|
Wheeled (タイヤ) |
車輪による前進・後進の移動 旋回 その場での立ち上がり その場でのしゃがみ込み ロボットの高さ調整 転倒後の立ち上がり 地上高の検出 |
車輪による前進・後進の移動 旋回 その場での立ち上がり その場でのしゃがみ込み ロボットの高さ調整 転倒後の立ち上がり 地上高の検出 |
| その他 | ||
| 非常停止ボタン | 標準 | 標準 |
| スペアのバッテリー | オプション | オプション |
|
Roll cage (Tron1の腰あたりに取り付ける金属製の囲い) | 標準 | 標準 |
| 付属部品: Point-Foot | 標準 | オプション |
| 付属部品: Sole | 標準 | オプション |
| 付属部品: Wheeled | 標準 | オプション |
この製品についてのお問合せ・資料請求
製品カタログのご請求、その他、各種お問合せを、こちらのメールフォームにて承っております。
※弊社の個人情報取り扱いについてプライバシーポリシーをご確認の上、お問い合わせください。
入力フォーム読み込み中...フォームが表示されない場合